As we collected the flying robot
What we wanted
We have at the faculty of innovation and high technology MIPT this type of cool course - an innovative workshop. In short - third-year students are recruited teams who are trying to do something real, preferably connected somehow with programming and modern technology itself. This is what we wanted to achieve. Our project is to make a plane (yes, not modern fashion quadcopters!), Which will be able to take off / land in automatic mode, fly through GPS points, and shoot everything that it sees on the built-in camera. FPV, we also wanted, but later.
Remark
A post is more likely not a scientific-technical one, but from the category of cool-story, in which there were many failures, but there was some kind of success. So everyone who wants to laugh and find out what we have done, please under the habr-kat.

Who are we
Our team consisted of five third-year students, and was more like a zoo:
two positives, a real ios-developer, a mathematician, and a girl who is obliged to hold us together and force us to do something.
')
Plus, three guys from ABBYY worked with us, because our project was from this company.
As we first wanted to do all this
The plan was simple - we buy hobbyking for the simplest aircraft in RTF (ready to fly) configuration, pull the radio out of it, insert the arduinka there or, perhaps, the board on the AWS from the broken smartphone, install the firmware there (in the case of the AWS - ROS - robot operating system, Arduinka - something from ardupilot, megapirat, multi-wii or some fork of all this). After that, we get what we wanted, calmly close the course, and then work on improving the whole of this business - fastening the camera's suspension, doing control of this suspension, trying to come up with some more chips and add them. What came out of it? Eh ... Well, at least something.
Purchase of components
Initially, we ordered two copies of the rather popular second Bixler - hobbyking.com/hobbyking/store/__32541__Hobbyking_Bixler_2_EPO_1500_KIT_.html ,
These brains were selected - www.hobbyking.com/hobbyking/store/__26588__MultiWii_PRO_Flight_Controller_w_MTK_GPS_Module.html
Having ordered all this, we began to wait for the valiant Russian Post.
Here I will immediately leave a review about HC - the Chinese have not only made out the purchase for three days, they haven’t given the tracking number either, and failed to get it from them. As a result, we ordered the package in mid-March, received it on Victory Day, May 9th ... The semester ended already.
At the end of April, we realized that it was impossible to continue to wait and wait for the mythical premise, and we had to do something.
In Russia, the aircraft was bought, the strongest (for the first flights), which could drag our board and, in the future, the camera.
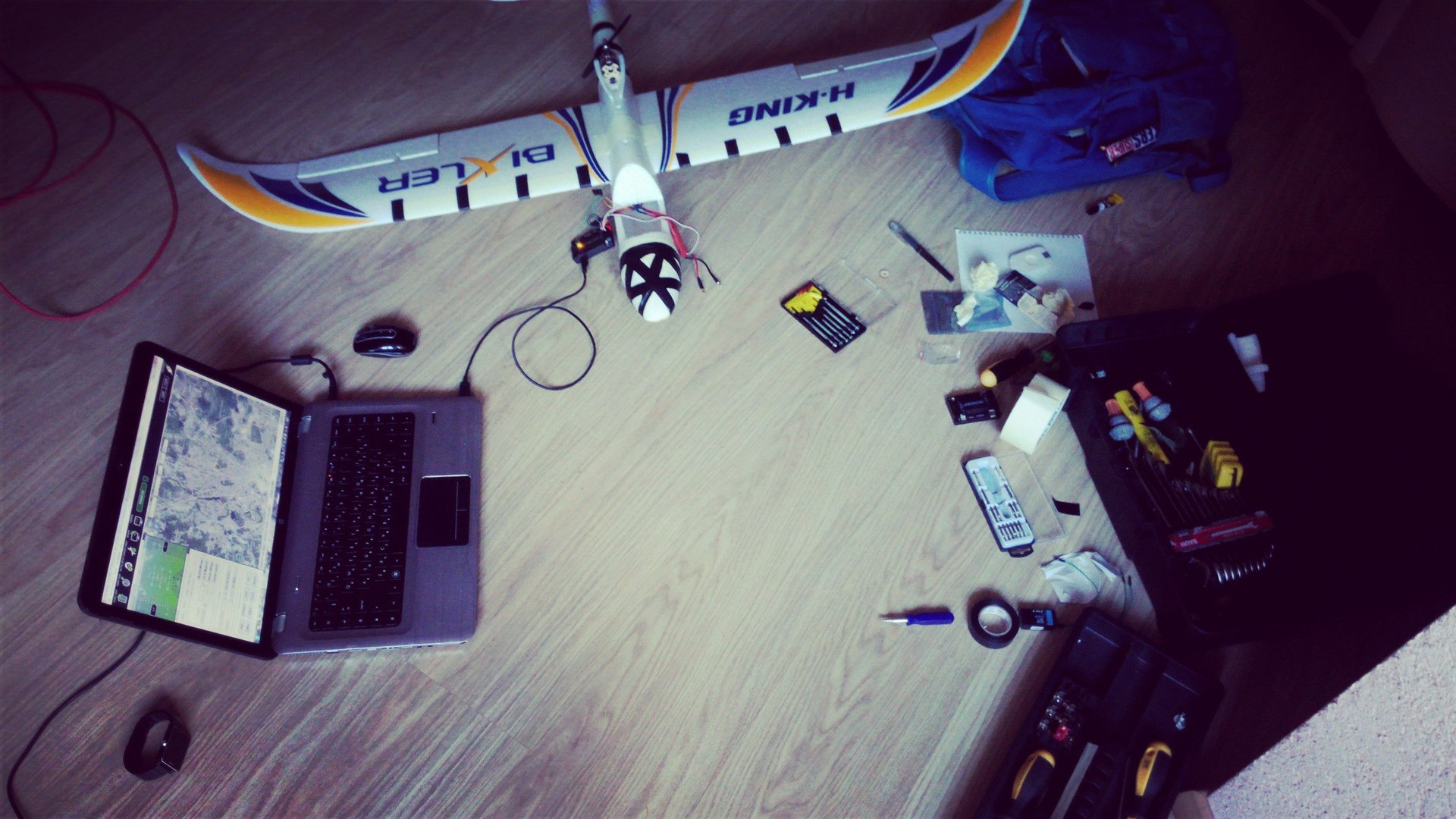
Here is a photo of the aircraft:

BY
After long disputes and attempts to collect something sensible, we stopped at the Ardupilot, which besides being able to do a lot of cool things right out of the box, there is also a very cool thing - APM Mission Planner, which allows you to put missions into the board right from the convenient Guy (which we thought the users would like) + you can also set missions using your tablet / phone, you only need USB OTG support to set up a mission, and telemetry dialing on the plane to monitor its status and change targets on the go.
First build
Having collected this most red plane, we very long and stubbornly set up PIDs, because it is not very popular, it looked more like artisanal production, and we did not find normal ready-made configs for it. In total, 321 parameters are required in the firmware, which determine how the firmware will control the iron. Nothing good came out of it, we could not fly up in automatic mode.
New aircraft
Then May 9 came, and happiness befell us — our planes arrived. The truth came in a completely disassembled state, so we spent the evening on their full assembly.
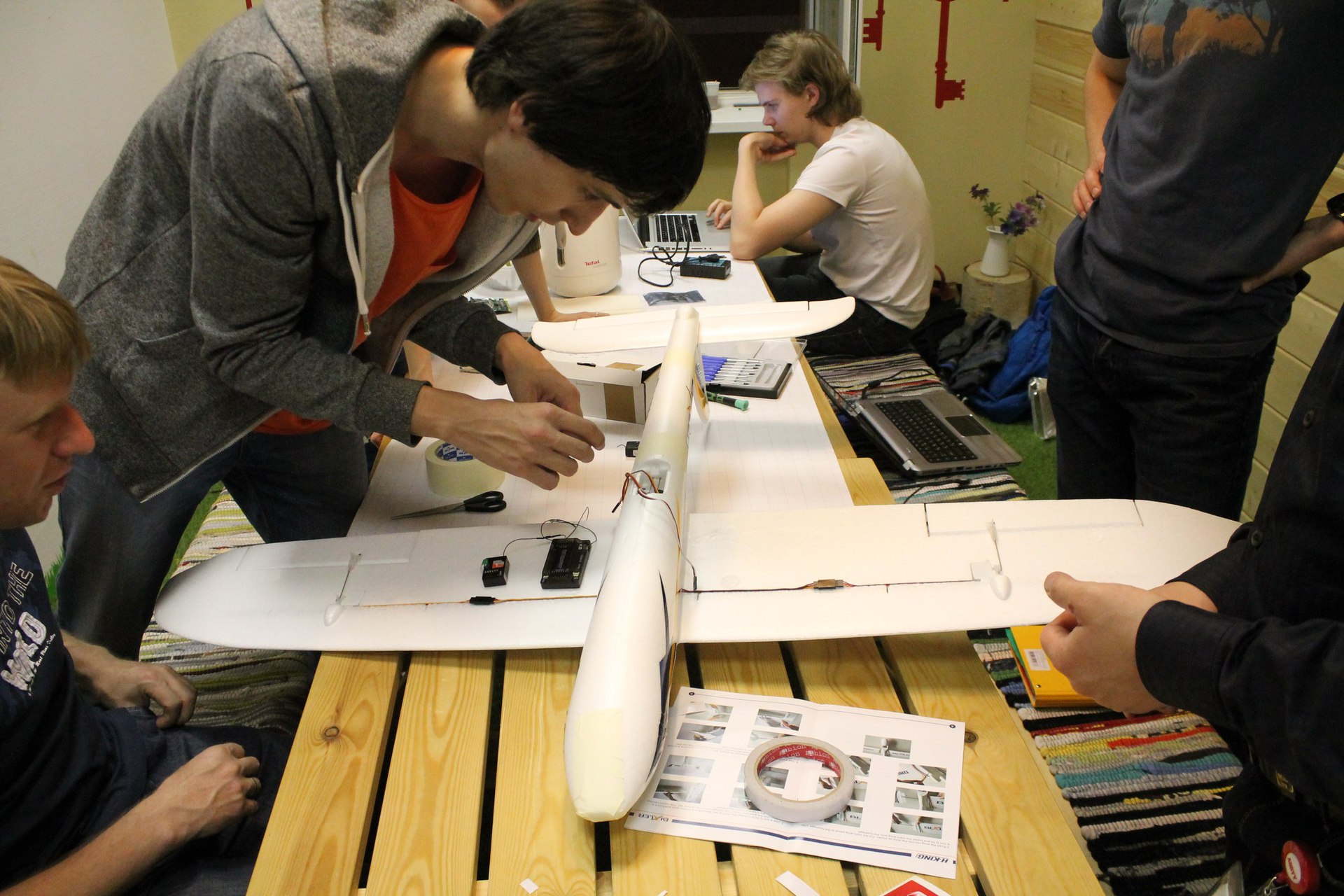


First flight
Having collected the plane, we went to fly. At first, of course, nothing happened - the plane did not want to automatically go on a mission, did not turn on the engine after starting from the hand. After that, we rummaged in the configurations and settings - it turned out that when the power was turned on, the board defaulted to the wrong mode of operation - waited for the connection to the PC, and did not try to start the mission.
After that was the funniest and saddest moment of our flights. Late in the evening, after the next launch, the plane flew. Poduul side wind, he tried to stabilize, and ... turned upside down ... We mixed up the polarity of the serv connection, responsible for the ailerons ... However, the flight did not end there - after 20 meters the plane reached the belly up to the landing zone, and yes, I started to land. Given that we did not confuse the polarity of the elevator, the plane went straight up and caught on the branches of the tree.
Photo report of the day -



As you can see, we strengthened the nose and the wings of the aircraft with electrical tape and mounting tape - and for good reason. After all the accidents and crashes, the plane steadfastly held and flew, and it took about 5-10 minutes to prepare it for the next launch.
However, the first day of the flight ended in nothing - it got dark, but we never learned to fly.
The second flight day didn’t bring us anything useful - after trying to fly for 2 hours, our plane hung on a high birch tree, and the brave local archers, the Tolkinists, took it off from there. Repair took all night.
Success
Before the presentation of our project, there was only 2.5 hours left, it was 6 am on the clock, and we went to try to fly.
The first flight was almost the last:

We already thought that this photo will be the only slide presentation of our project.
It turned out that during the launch JPI went away - a jumper on the board that determines where the board comes from - from the ESC of the aircraft or from USB.
Video failure:
However, we have repaired, and we were waiting for a partial, but success.
As you can see, after launching, automatic mode was turned on from the hand, the plane took off its turnovers (because control passed to the board), dived down, then lay down on the course, reached the landing zone and sat down more or less gently. Unfortunately, the operator was not lucky, and we took it off crookedly. However, it is clearly seen how the plane keeps heading and stabilizes.
After that, we could not fly again - the JPI jumper kept on the snot and constantly flew out, and time was running out.
In the near future, plans to attach a camera and fly over large areas, but this is a topic for the future post.
If someone is interested in something, he is ready to answer in the drug / comments / one more post.
ps And here we are on a tree:
Source: https://habr.com/ru/post/224963/
All Articles