Competition of flying robots, stage number 2: now not a million, but 5 times 200 thousand times
Last year we held a competition for flying robots. It was necessary to quickly fly through the maze, bypass the obstacle, after seeing the landing marker, land on it, take off and return. Within the framework of the competition, all of this went through one of the 536 declared robots.

These guys won a million
Their robot went through the maze in 6:45. This is a lot, but the drone made several visits to the finish marker (he took it as a starting marker, which he needed to land at the end).
')
Our robot flew out of competition for 4: 1. Here is his code on Github .
This time, we still cannot claim a prize, but we play with you. The task of the new stage is to fly faster than 6:15 minutes, for which we flew the updated landfill (about how we updated it, below) and finally take our 200 thousand rubles.
Video about how we flew the reference time, which must be beaten in the new stage of the competition.
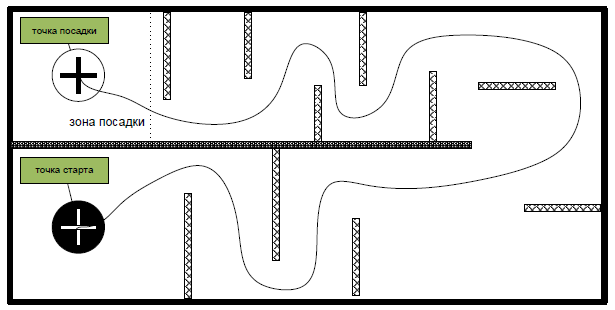
Polygon scheme of the last stage of the competition. There were two obstacles:

This year the test site remained the same - 37.4 by 8.8 meters, but the obstacles became more - at least 1.8 meters of gap between them:
He is the same. The wall covering is the same as at the last final - polymer, color RAL 5024 (in some places there are chips and shabby after winter). The level of illumination will depend on the weather, contrast markers (white on black and black on white). The walls are radiotransparent and fixed with curbstones. Previously, the polygon was covered with a mesh with polyethylene, now it's just a mesh. Therefore, participants should take into account that they are not insured against rain and wind. We made our reference flight in conditions of light snow and rain, which introduced some interference with the operation of our sensors. So, before registering for tests or a competitive task, see the weather forecast. For testing, you have two full days at a real test site, but note that you may not be the only team at the test site these days. However, last summer it did not bother anyone.
Read more about the technical features of the competition in the rules. Link to them - at the end of the topic.
We showed the reference time to be beaten on the same drone, on the same platform (Mikrokopter LX). This time, we put all the elements of the drone on a new frame made of composite materials. At the same time, we left all the control and navigation algorithms unchanged; we only reconfigured the parameters for the conditions of the new polygon and for the new frame in order to fly more carefully.
Our sensors:


It seems to me that few of the participants in the previous competition will be able to get by with minor modifications and will be able to prepare for a new stage in a week or two. Most teams sharpened their solution for a specific polygon scheme, so adding obstacles will confuse them with all the maps. Redo and test will have a lot.
Special thanks: Moscow Aviation Institute (strategic partner), Pilotage store and the Polytechnic Museum (technical partners).
These guys won a million
Their robot went through the maze in 6:45. This is a lot, but the drone made several visits to the finish marker (he took it as a starting marker, which he needed to land at the end).
')
Our robot flew out of competition for 4: 1. Here is his code on Github .
This time, we still cannot claim a prize, but we play with you. The task of the new stage is to fly faster than 6:15 minutes, for which we flew the updated landfill (about how we updated it, below) and finally take our 200 thousand rubles.
A little excursion into the past
- Report from the final of the competition , photos, videos, errors and results.
- How we prepared our robot for the last competition .
- Winners report and some screenshots from the eyes of the robot.
And now about this contest
Video about how we flew the reference time, which must be beaten in the new stage of the competition.
Polygon scheme of the last stage of the competition. There were two obstacles:
This year the test site remained the same - 37.4 by 8.8 meters, but the obstacles became more - at least 1.8 meters of gap between them:
What exactly has changed?
- Million in the prize fund remained. But now there are five prizes, and each - 200 thousand rubles.
- Finals, as last year, will not. Each team allowed to fly, it determines the day of his attempt and agree it with the organizers. - To win, you need to fly the maze faster than us. We did it in 6 minutes and 15 seconds. The first five participants who completed this task win. So do not delay with your attempts.
- There are more partitions at the site - now there are ten obstacles. Their location is very close to what is shown in the diagram.
- There are three valid attempts, not two.
What you need to know about the landfill?
He is the same. The wall covering is the same as at the last final - polymer, color RAL 5024 (in some places there are chips and shabby after winter). The level of illumination will depend on the weather, contrast markers (white on black and black on white). The walls are radiotransparent and fixed with curbstones. Previously, the polygon was covered with a mesh with polyethylene, now it's just a mesh. Therefore, participants should take into account that they are not insured against rain and wind. We made our reference flight in conditions of light snow and rain, which introduced some interference with the operation of our sensors. So, before registering for tests or a competitive task, see the weather forecast. For testing, you have two full days at a real test site, but note that you may not be the only team at the test site these days. However, last summer it did not bother anyone.
Special features
- The robot must be autonomous. The calculator may be on board or at a ground station. If you use a radio channel for control, then remember about the noise of the air: last year it created difficulties for many participants.
- Last year there were pools - they can become a problem in the tasks of recognition or camera navigation.
- If you are debugging your robot indoors, do not forget that there will be wind at the test site.
- Oriented by the magnetometer most likely will not work because of the reinforced concrete structure of the building.
- If you use a lidar, then take into account that in sunny weather on the street, it may not behave like it is indoors: the range may be reduced, and certain sectors may even fall out of measurement. Check.
- Screw protection required. Plus, you must have an emergency shutdown console, which during the attempt will be in the hands of the judge.
- You can use both custom flying platforms and finished ones, like ArDrone. This is a competition not only for designers, but also for software developers, so if you had everything out of the box, except for implementing the logic of the assignment, this is also considered.
- Do not make the robot too big. Remember that the minimum width of the passage between obstacles is 1 m 80 cm.
- The height of the flight from above is limited by a grid, which is at a height of 2.7-3 meters from the floor. The floor is mostly flat, but you need to consider that in some places there are protrusions up to 10-15 cm in height, such as protective nets for cables or structural fasteners. If you watch the video with our flight, you can see them.
- Navigation any. GPS, lidars, camera ultrasound, radio beacon triangulation, and so on. If you are going to use additional ground navigation equipment, keep in mind that you cannot install it inside the flight zone ..
- There are restrictions to voltage (48 V), radio frequencies, power of emitters and so on - all according to our standards and regulations.
Read more about the technical features of the competition in the rules. Link to them - at the end of the topic.
About us
We showed the reference time to be beaten on the same drone, on the same platform (Mikrokopter LX). This time, we put all the elements of the drone on a new frame made of composite materials. At the same time, we left all the control and navigation algorithms unchanged; we only reconfigured the parameters for the conditions of the new polygon and for the new frame in order to fly more carefully.
Our sensors:
- Sonar to determine the height
- Landing marker recognition camera
- Lidar for building a dynamic map and localizing a robot in space.
- The data on the corners and corner angles we take from the IMU Mikrokopter
- The calculator is based on Intel NUC i3. OS - Ubuntu 12.04. Used libraries: OpenCV and ROS. For flight simulation, we used the Gazebo simulator.
About the participants of the last contest
It seems to me that few of the participants in the previous competition will be able to get by with minor modifications and will be able to prepare for a new stage in a week or two. Most teams sharpened their solution for a specific polygon scheme, so adding obstacles will confuse them with all the maps. Redo and test will have a lot.
Chronology
- Till October 1 - acceptance of applications. It is already open from April 1st. Requirements for applications rather severe. In fact, in your application, you must show that you can already show something at our test site.
- After filing the application, it will be possible to coordinate with the organizers the days of tests and valid attempt.
- October 15 - deadline for test. But, as I mentioned above, the competition may be closed earlier if by October 15 there are 5 participants who flew faster than the designated time.
References:
- Once again the code of our robot . It is interesting in that you can see how we used the tools and libraries. Perhaps he will help you in developing your own solution.
- rules
- Applications here - robots@croc.ru . More details on what is needed for the application, here .
Special thanks: Moscow Aviation Institute (strategic partner), Pilotage store and the Polytechnic Museum (technical partners).
Source: https://habr.com/ru/post/224253/
All Articles