Bionic hand that catches objects on the fly
The robo-arm, developed by a team of researchers from the EPFL, is capable of catching objects of various shapes flying along different paths.
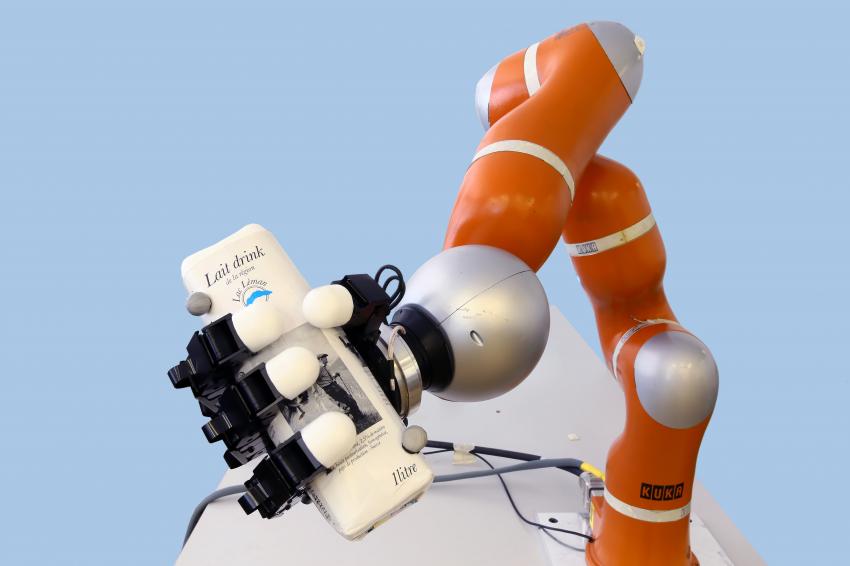
Here he stands motionless with an open hand, and a moment later, suddenly spins up and catches all kinds of flying objects thrown in his direction, starting with a tennis racket and ending with a ball. The arm consists of three joints and four fingers, with a total length of about 1.5 meters. The programming of this robot was done by the EPFL - LASA (Learning Algorithms and Systems Laboratory) laboratory. It is unique in that it is able to catch objects of various irregular shapes, while making a decision in less than 0.05 seconds.
More and more robots are present in our daily life to perform various tasks, and with the ability to catch an object or dodge complex objects while in motion, they can become even more mobile and perform even more functions. - says Aude Billard, head of LASA
')
This manipulator already has a real possibility of use in space. This is directly related to the project of the Swiss Space Center at EPFL , whose goal is to develop technologies for the disposal of space debris in orbit around the Earth. Built into the satellite, such a hand, watching for flying objects in space, is capable of catching flying debris.
Machines in our time are basically not able to quickly absorb changes in data. Consequently, their choice consists in recalculating the trajectory, which takes too long from them in a situation where every fraction of a second can be decisive. - added Aude Billard, head of LASA
To get the expected reaction time and adaptability, LASA workers began to apply a method similar to trial and error, called Programming by demonstration . The hand in this case is sent manually, repeating the movements that should occur when catching objects.
The experiment was carried out by catching a ball, an empty bottle, a half-full bottle, a hammer and a tennis racket. These five different objects were chosen because they offer a diverse range of situations where the part of the object that the robot must catch (for example, the racket handle) does not correspond to its center of gravity. In the case of a bottle, an additional problem appears as its center of gravity moves several times during its flight.
In the first stage of the experiment, objects were thrown several times in the direction of the robot. Through a series of cameras located around the robot, he creates a model of a flying object and calculates its flight path, speed and rotational motion. Scientists were able to translate everything into an equation that allows the robot to choose a position very quickly in the right direction. Within just a few milliseconds, the robo-arm refines and corrects the trajectory of the object in real time and catches it with high accuracy.
Info taken from phys.org
Translation and article prepared by the Telebreeze Team
Our Facebook and Twitter page
Source: https://habr.com/ru/post/222641/
All Articles