HD FPV on Raspberry Pi. Bug work
In the previous article I talked about the possibility of flying HD FPV based on the Raspberry Pi with the organization of Wi-Fi bridges using the modules of the Ubiquiti Bullet M2 HP.
The first pancake came out lumpy. The result of the experiment turned out, as they say: “the third variety is not a marriage,” with some serious reservations and a “rake”, but the main goal of the experiment was achieved. The idea to get HD FPV bywire Wi-Fi was successfully tested.
As I expected, the publication on Habré not onlyprohibitively exaggerates the EWS increases karma, but also allows you to hear the opinion of the community and get very valuable recommendations and good advice. In the comments to the article, tips were received, a little later comprehended and implemented on the third day.
Antenna farming on earth. Depending on the experiment, either the “clover” or the sector antenna was connected to the RF connector of the Wi-Fi module.

')
Board with a "pin"

Board with "clover"
Ardupilot 2.0
Test flight on a whip antenna, on the ground sector.
Test flight on "clovers"
The results were surprisingly quite good. Objectively, the “clover” performed better, so all further tests were conducted on “clovers”.
Test flights over distance were conducted in two resolutions HD 1280x720 and 800x600
1280x720
800x600
For this permission, please do not scold ... they say HD is promised, but this is not it. Exclusively for the purpose of experiment. In the future, there will be tests up to 320x200
The radius of confident reception has exceeded 700 meters!

We decided to protest Full HD
1920x1080
The result is a bit predictable, not far ... but WORKS!
More tests for distance and landing on the monitor . There will have to believe a word ... the pilot really planted the foyer-force by the thought of looking at the ground computer monitor.
800x600
Compared with the previous experiment, the result has improved significantly. The system works and there is whereto fly to dig further. The question will fly up or will not fly up any more. Definitely HD FPV took off!
There is already a USB GPS, connected it to the raspberry, NMEA knocks so that it does not stop. In the presence of a solution with connecting the MPU-9150 gyroscope on an I2C bus to a raspberry, you can of course receive the required data from the Ardupilot ... here the question is still open.
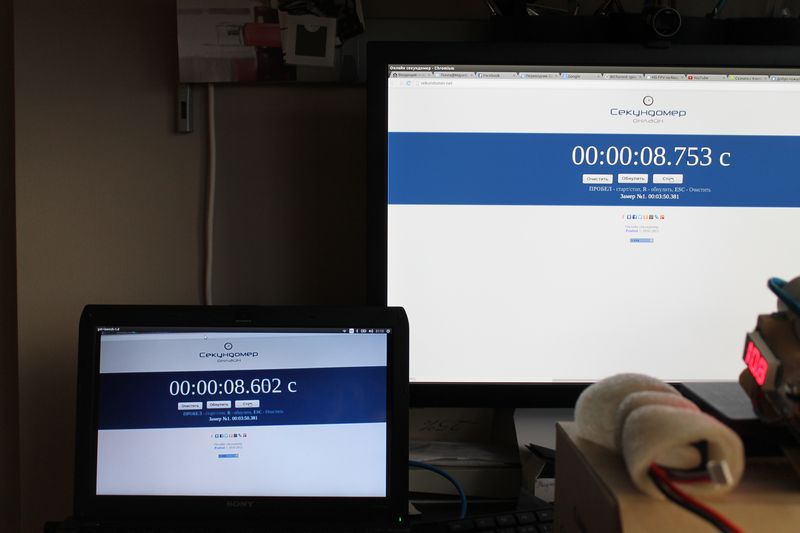
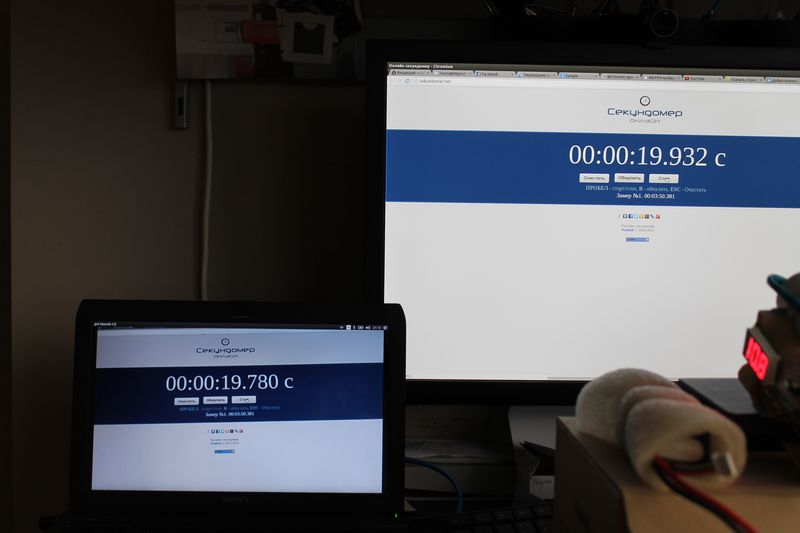
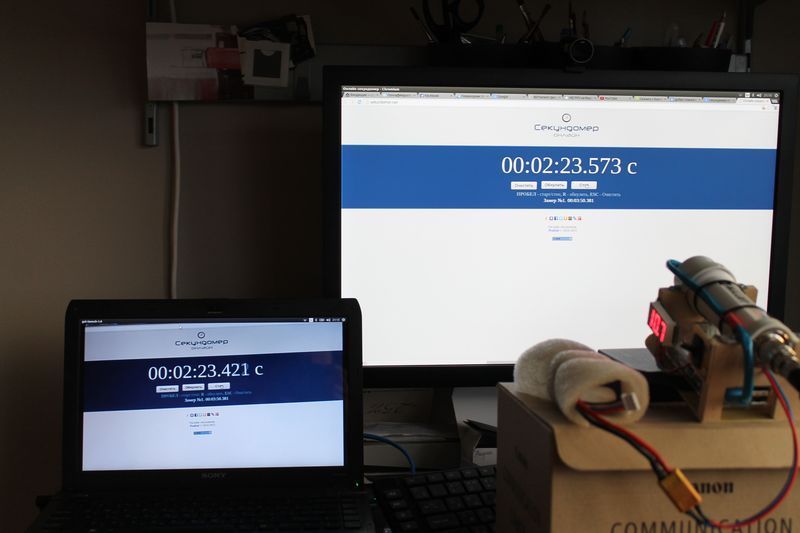
PS promised delay metering
The flight camera looks at a large monitor on which the stopwatch is displayed, on the small monitor thehorizon is overwhelmed by the received wifi signal.
A photo

And a small video
Delay ~ 150ms
The first pancake came out lumpy. The result of the experiment turned out, as they say: “the third variety is not a marriage,” with some serious reservations and a “rake”, but the main goal of the experiment was achieved. The idea to get HD FPV by
As I expected, the publication on Habré not only
What has been implemented, corrected and supplemented
- Experiment 1. Used antennas with circular polarization. "Clover" on the ground and on board.
- Experiment 2. Used antennas with linear polarization. On the ground sector 70grad x 70grad, on board the "pin".
- Record of the received video stream on the earth, for further analysis.
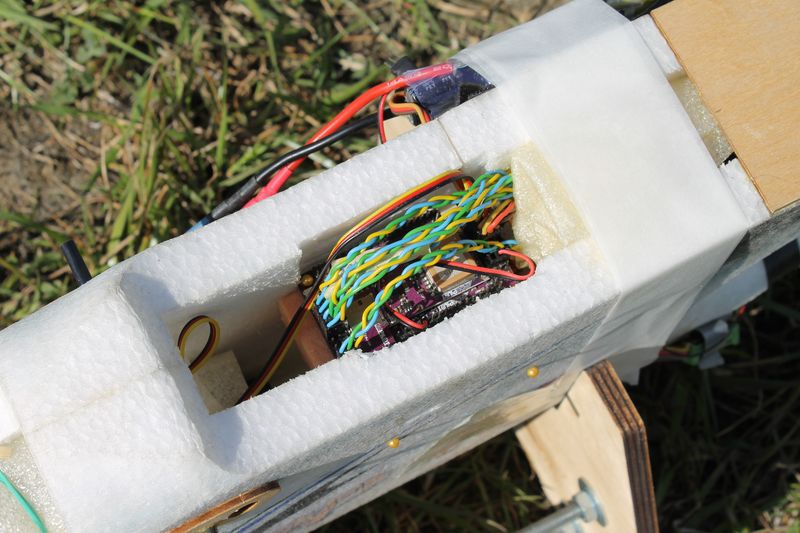
- Board with flight "brains" Ardupilot 2.0 for stabilized flight. In case of loss of communication (visual, video, RU) with the board, the ability to automatically return to the base.
- Fixed an annoying
DNAbugfrom thepast experiment. Both Wi-Fi moduleburnedworked at full power 28dBm.
Materiel
Antenna farming on earth. Depending on the experiment, either the “clover” or the sector antenna was connected to the RF connector of the Wi-Fi module.
')
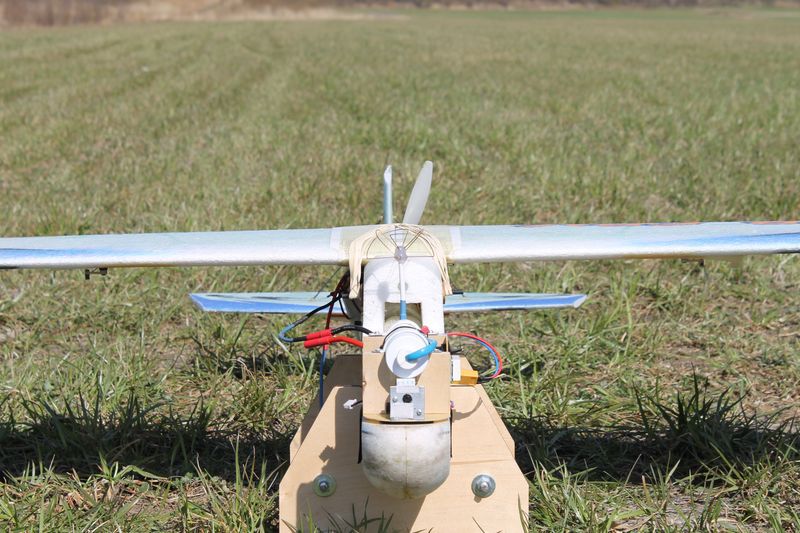
Board with a "pin"
Board with "clover"
Ardupilot 2.0
Many videos
Test flight on a whip antenna, on the ground sector.
Test flight on "clovers"
The results were surprisingly quite good. Objectively, the “clover” performed better, so all further tests were conducted on “clovers”.
Test flights over distance were conducted in two resolutions HD 1280x720 and 800x600
1280x720
800x600
For this permission, please do not scold ... they say HD is promised, but this is not it. Exclusively for the purpose of experiment. In the future, there will be tests up to 320x200
The radius of confident reception has exceeded 700 meters!
We decided to protest Full HD
1920x1080
The result is a bit predictable, not far ... but WORKS!
More tests for distance and landing on the monitor . There will have to believe a word ... the pilot really planted the foyer-
800x600
Findings and immediate plans
Compared with the previous experiment, the result has improved significantly. The system works and there is where
- Consider in more detail the location of the antenna on board.
- To test a variant with a ceiling antenna with linear polarization (it is already awaiting at the post office).
- To test the performance of the system at altitude - this will require reworking the foam, because He is not very strong and he climbs very
sadlyslowly. - To test the 5.8 GHz modules, there is an interesting offer from the habraser kunks .
- A separate front of work opens up opportunities for the implementation of OSD - the imposition of flight information on the broadcast picture. The pilot is already very necessary
to direct the aircraft to the targetto receive the height and voltage of the onboard battery. - It is interesting to build GPS flight tracks and combine them with video, for deeper experiments and effective range analysis.
There is already a USB GPS, connected it to the raspberry, NMEA knocks so that it does not stop. In the presence of a solution with connecting the MPU-9150 gyroscope on an I2C bus to a raspberry, you can of course receive the required data from the Ardupilot ... here the question is still open.
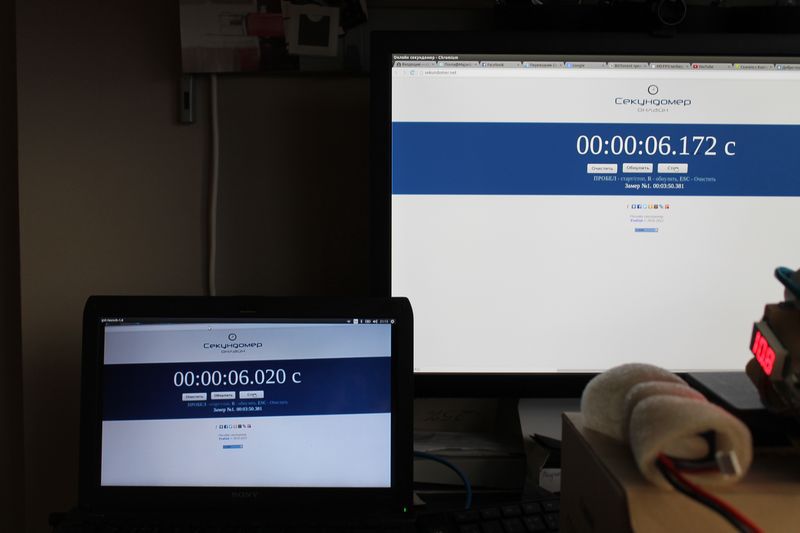
PS promised delay metering
The flight camera looks at a large monitor on which the stopwatch is displayed, on the small monitor the
A photo
And a small video
Delay ~ 150ms
Source: https://habr.com/ru/post/220953/
All Articles