HD FPV on Raspberry Pi
Crimson HD FPV foam

After reviewing in detail the article of the article Iron samples for HD FPV , it was decided to repeat the feat based on the Raspberry Pi + Pi Camera.
Introduction
With the main idea of the habrauser Gol about analog FPV, I completely agree! In the digital age, enjoy the PAL signal, akin to breathing in the scent of flowers in a gas mask (IMHO). Armed with a crimson set, it was decided to remove the
Raspberry pi | Pi Camera |
For Wi-Fi bridge used proven ubiquiti bullet m2 hp .

This Wi-Fi module is great for mobile platforms. easily powered by POE from an onboard battery; it is enough to supply power to two pairs (7-24V, blue pair + , brown pair - ), has small dimensions, has good power and industrial performance. Also a nice bonus is the model at 5.8 GHz in a similar form factor, which allows, without changing the design of the platform, to switch to a different frequency range, simply replacing the Wi-Fi module and antenna.
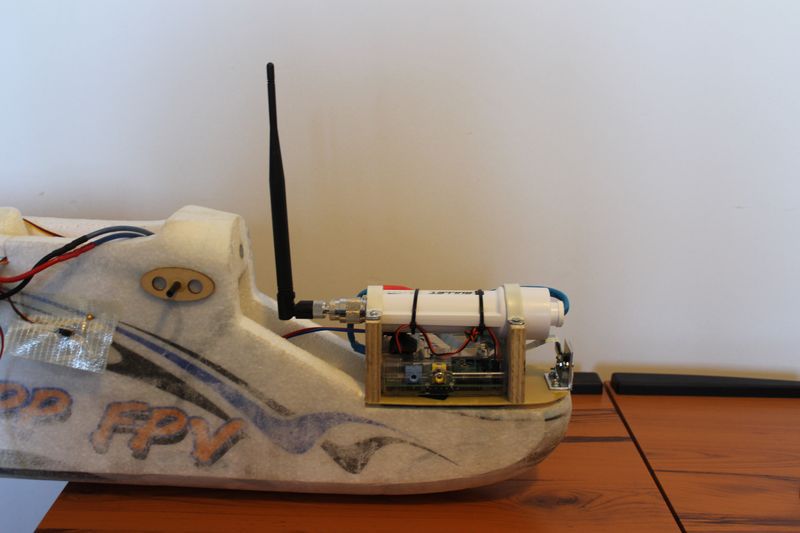
As an experimental carrier of

The advantages of this unit is the ease of installation of the necessary equipment, ease of piloting, carrying capacity and enormous maintainability. The latter feature rescued more than once after the crash, everything is assembled on epoxy glue and our
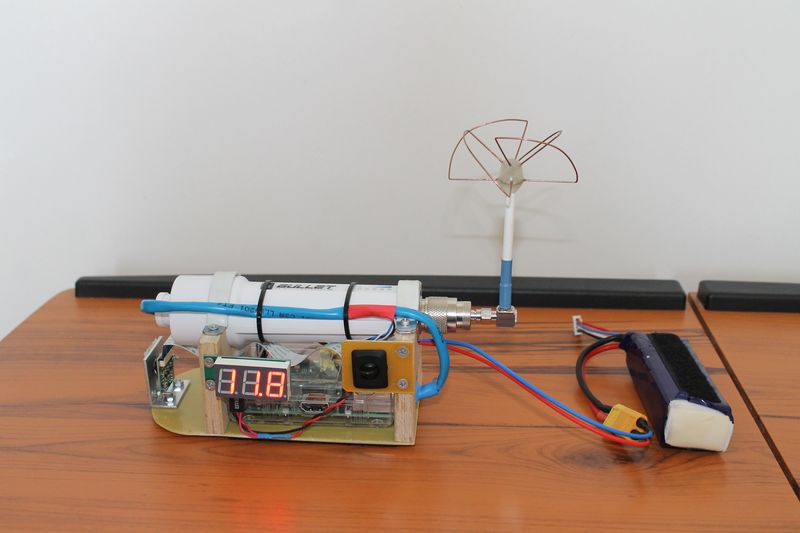
Foam payload
')
- Camera
- Raspberry running raspbian
- Wi-Fi module with antenna
- Voltage indicator
- Main toggle switch
- Raspberry power supply
- Battery connector
A homemade 2.4 GHz clover from an analog FPV and an ordinary Wi-Fi pin were used as antennas.
Land




- Laptop running Ubuntu 12.04 LTS with a sun visor
- Athena D-Link ANT24-0801
- Wi-Fi module
- Battery power module
The antenna was selected on the basis of a wide radiation pattern of 70 degrees vertically, 70 degrees horizontally.
Soft
Broadcast was carried out using Gstreamer .
The first important point. My colleague set up the software, for which he thanks. I will simply give the used scripts to run the broadcast on raspberries and receive the video stream on the laptop.
Board
raspivid -n -w 1280 -h 720 -b 4500000 -fps 30 -vf -hf -t 0 -o - | \
gst-launch-1.0 -v fdsrc ! h264parse ! rtph264pay config-interval=10 pt=96 ! \
udpsink host=192.168.4.204 port=9000Land
gst-launch-1.0 -v udpsrc port=9000 caps='application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264' ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=falseGo...
The second important point. I am not a pilot. An experienced pilot controlled the foam, for which a special thanks to him. We fly for a long time and successfully on different devices. At this stage, I acted as a starting upper stage.




... arrived
With flights it happened exactly three times, because all the same, we overloaded the plane, shoving a very large battery into it, hoping to fly very long. Because of this, and so the low-speed machine has become quite cumbersome. When landing, it was not possible to overcome the lateral gust of wind, the device fell on the wing and stuck its nose to the ground. A large and heavy battery decided to break out and finally broke free, slightly breaking the foam fuselage (I wrote about maintainability, the epoxy had already dried up, the


That's why everything was started!

HD FPV was ... just not far away. It was really possible to get a video without lags on a very small part of the field.
The whip antenna according to its radiation pattern (horizontal donut) behaves ... like a whip antenna, i.e. at the height and with strong inclinations / turns, when the petal misses the receiving antenna, lags begin.
Video from the whip antenna, wrote from the monitor screen 15 fps ... gives some picture of what is happening.
In the future, direct recording of the received stream will be configured.
The antenna "clover" has a spherical radiation pattern, but not a very high range for our channel, therefore, with the "long-distance" spans, a rake also appeared on the image. Video unfortunately not.
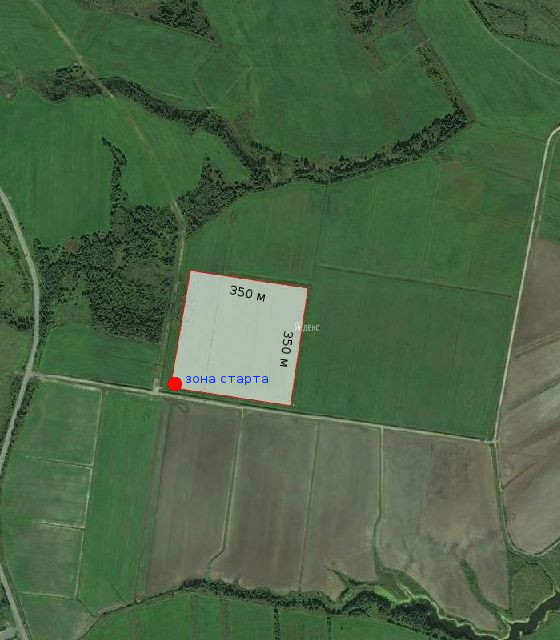
After the crash, two hikes were conducted on foot across the field with different antennas and as they say, the result is a bit predictable: the range leaves much to be desired, the whip antenna works a little further than 300-400 meters if the plane of the petal (donut) falls into the receiving antenna, the “clover” can twirl as you like, but because it broadcasts in all directions the same range even less than the “pin” to 300 meters.
findings
FPV HD flights are a reality! WORKS!
Otherwise, the conclusions are the same as for Gol . The weak point of the Wi-Fi, or rather the on-board antenna, if on the ground you can deploy a rotary station tracking the UAV with a narrow antenna, then you need to reinvent something else with the board. To optimize the work of the wifi channel, the modules used have many settings, you need to dig in more detail there. Optimize (minimize) the flow from the board. And it is natural to think of a solution with an onboard antenna.
PS I found in the settings of the Earth module wifi that the low signal power was set to 10dBm instead of the prescribed 28dBm.
Plans for the near future
- Put on board the Ardupilot 2.0 highbrow brains (link to a slightly later model), since they already have been run in on this foam well - this will allow the
pilot nottobe nervous andfly away, because the brains, on command, return the foyer to the launch site on autopilot and, importantly, stabilize the glider in the horizontal plane even during turns - this will allow more efficient testing of the whip antenna. - Install (already on the way from China) and test the 2.4 GHz ceiling antenna. She has a hemisphere facing downward pattern, as we say, we will see.
- Test modules at 5.8 GHz.
- To organize on earth the recording of a stream to a file, otherwise it is somehow not human.
- PS And still turn on the
brainradiator at full capacity!
The third important point and gratitude to my wife for moral support and skillful possession of the camera, without which there would have been no great pictures of the whole process.
Next part
Source: https://habr.com/ru/post/220019/
All Articles