Review of the home robot ver 0.3
An overview of a homemade robot based on arduino, bluetooth and android.
Inspired by the articles on the magazine, I also decided to make a robot. At first, it seemed all so terribly complicated and little understood, but as I studied the topic, it turned out that it was quite simple to make a robot based on modern technologies. The knowledge of school physics in electrical engineering and C ++ was useful, although you really need to know the minimum and the threshold of entry is low.
Initially, there was a choice either to collect parts for the robot or to buy a ready-made kit (kit, designer). I chose for a long time, but having thought that there was no experience and knowledge in robotics, I stopped at “Bluetooth Controlled Robot Smart Car Kits For Arduino”.

')
It has everything you need to assemble and program the robot, without a soldering iron. The only negative is no instruction. Although later a poor instruction was found on the Internet in English and Chinese. There is a suspicion that this kit is issued for Chinese schoolchildren or students.
What came along with the designer:

4 x motor with gear;
4 x wheels (wheel mounts are not made of quality and over time they became loose and started to get off, I had to be screwed onto the screws);
4 x Mounting motors (aluminum bars);
2 x Plexiglas plates (100 x 213 x 5mm);
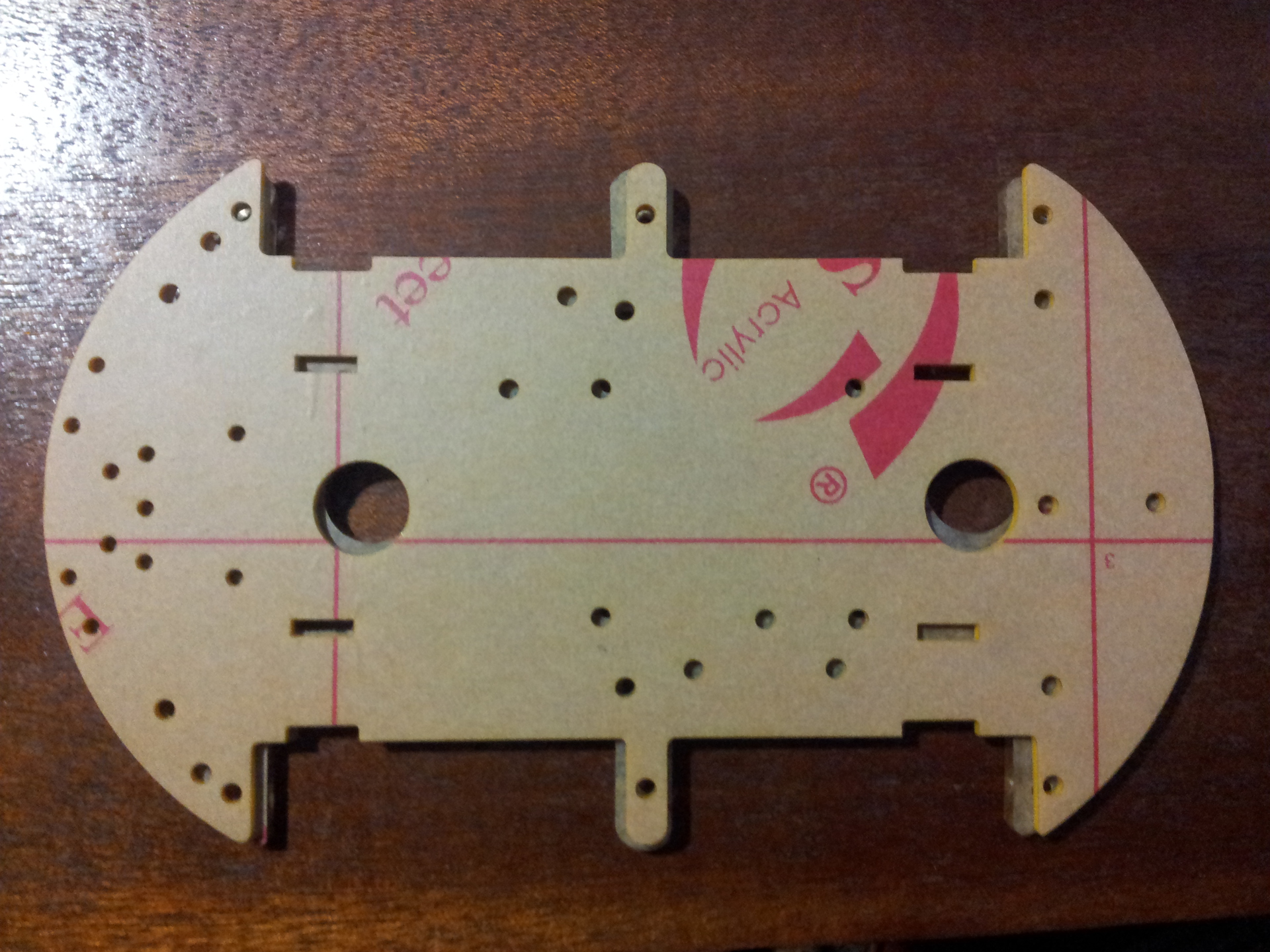
It is necessary to say separately on the plates, when it began to collect it turned out that one plate was cut out crookedly with offset and did not fit the second one. Apparently the Chinese who cut her were drunk. So I had to cut a new one out of plywood myself.
1 x L298N motor driver;
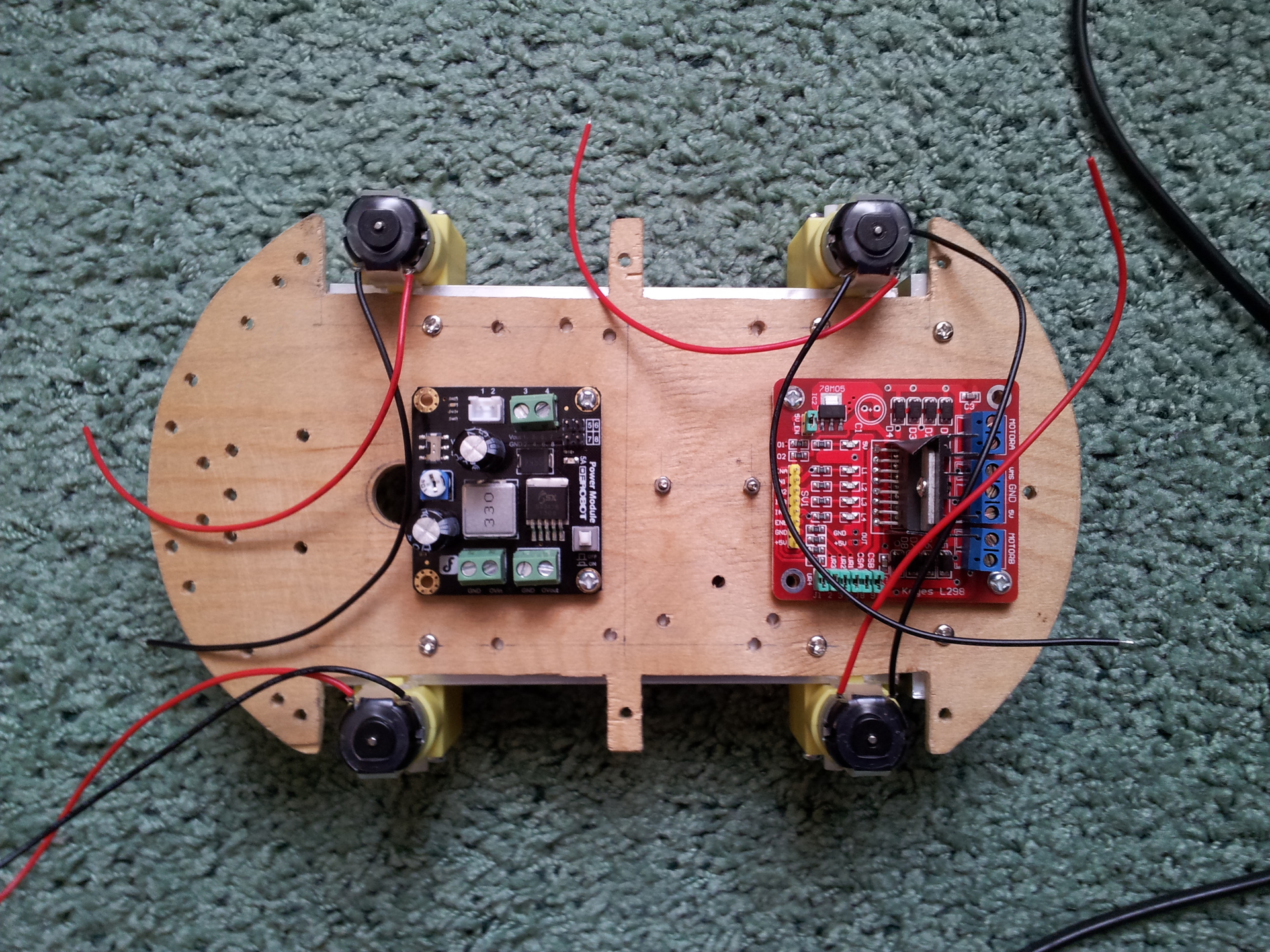
in the photo he is on the right
1 x Arduino UNO;
1 x Sensor board V5 - the second floor on the arduino for connecting the periphery of the sensors, serv without soldering and prototyping board;
1 x Battery holder;
1 x Micro Serva;
1 x Ultrasonic - ultrasonic rangefinder;
3 x line sensor;
1 x Infrared receiver;
1 x Remote control;
2 x 18650 rechargeable batteries (there were low-quality rechargeable batteries, almost immediately, a submerge);
1 x 18650 battery charger;
1 x Bluetooth module;
1 x USB cable 50cm;
30 x wires;
15 x Pillars (6 x 35mm / 3 x 20mm / 6 x 6mm);
All necessary screws and nuts.
With scattered information on the Internet, we managed to collect and program it. The constructor uses the L298N engine driver that allows to power two 2A channels and regulate the speed of the PWM motors with a signal. The first program actually did just run engines. Then he managed to run the program with an ultrasonic rangefinder, everything is pretty simple. But with the control from the infrared remote had to suffer. In general, such management is unstable, it works only in direct line of sight at a certain angle and does not always work, so I immediately refused it. Management did not immediately understand the bluetooth, but everything is quite simple there. Communication is organized just as through the serial port as well as via usb cable. I used the Bluettooth SPP program on the android phone. It is very convenient to program the buttons as you need and keeps a log of what comes on the show channel.
Then there were a lot of experiments and the study of the possibilities of the designer and the arduino. In summary, I can say that everything works quite simply, you can program it as you please, it causes a storm of emotions and satisfaction that drives around the room. And generally it is a terribly interesting hobby!
Then servos with mounts for the manipulator, infrared distance sensors sharp, voltage stabilizer and encoders were ordered. Gradually, the robot turned into something that you can see on the video and photos.

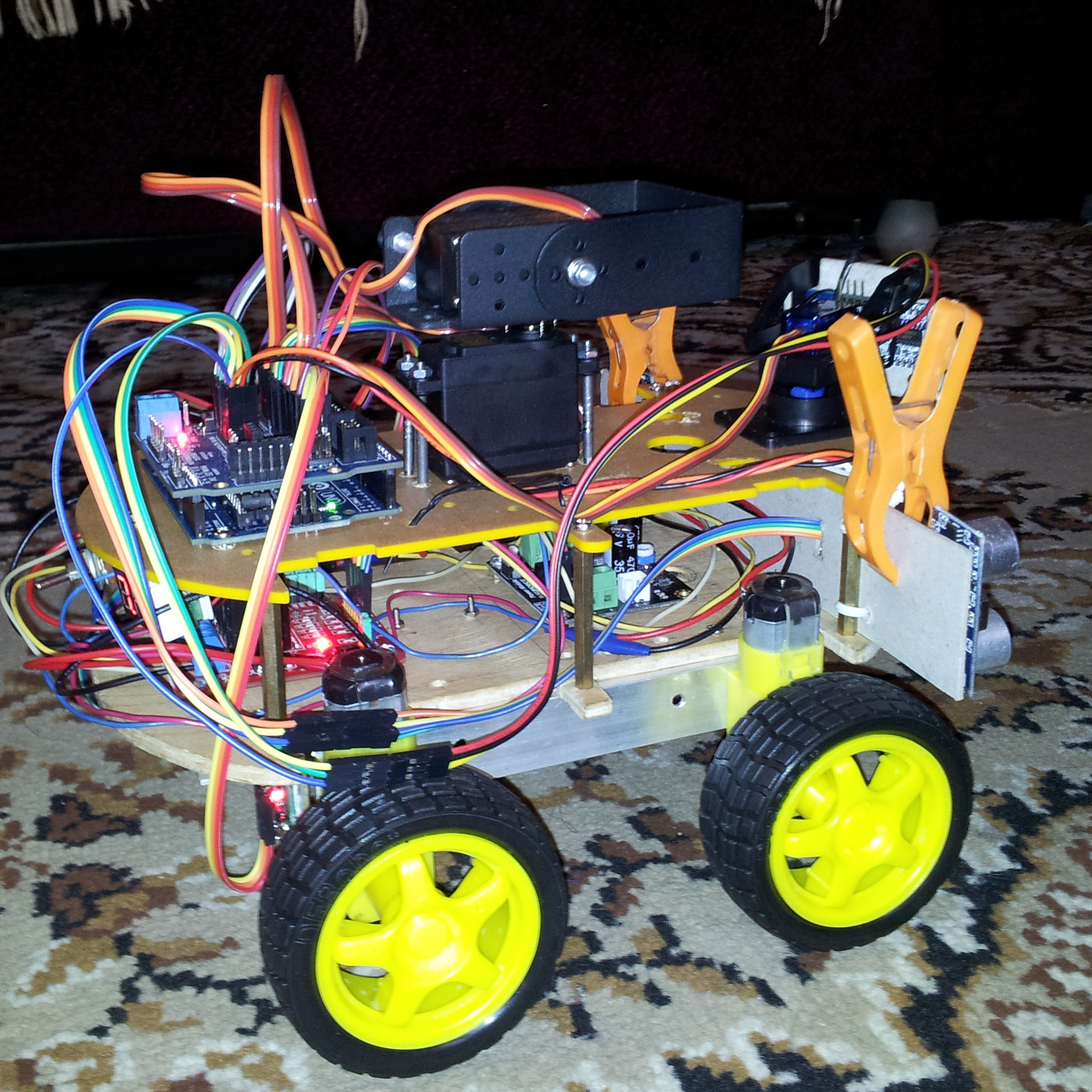
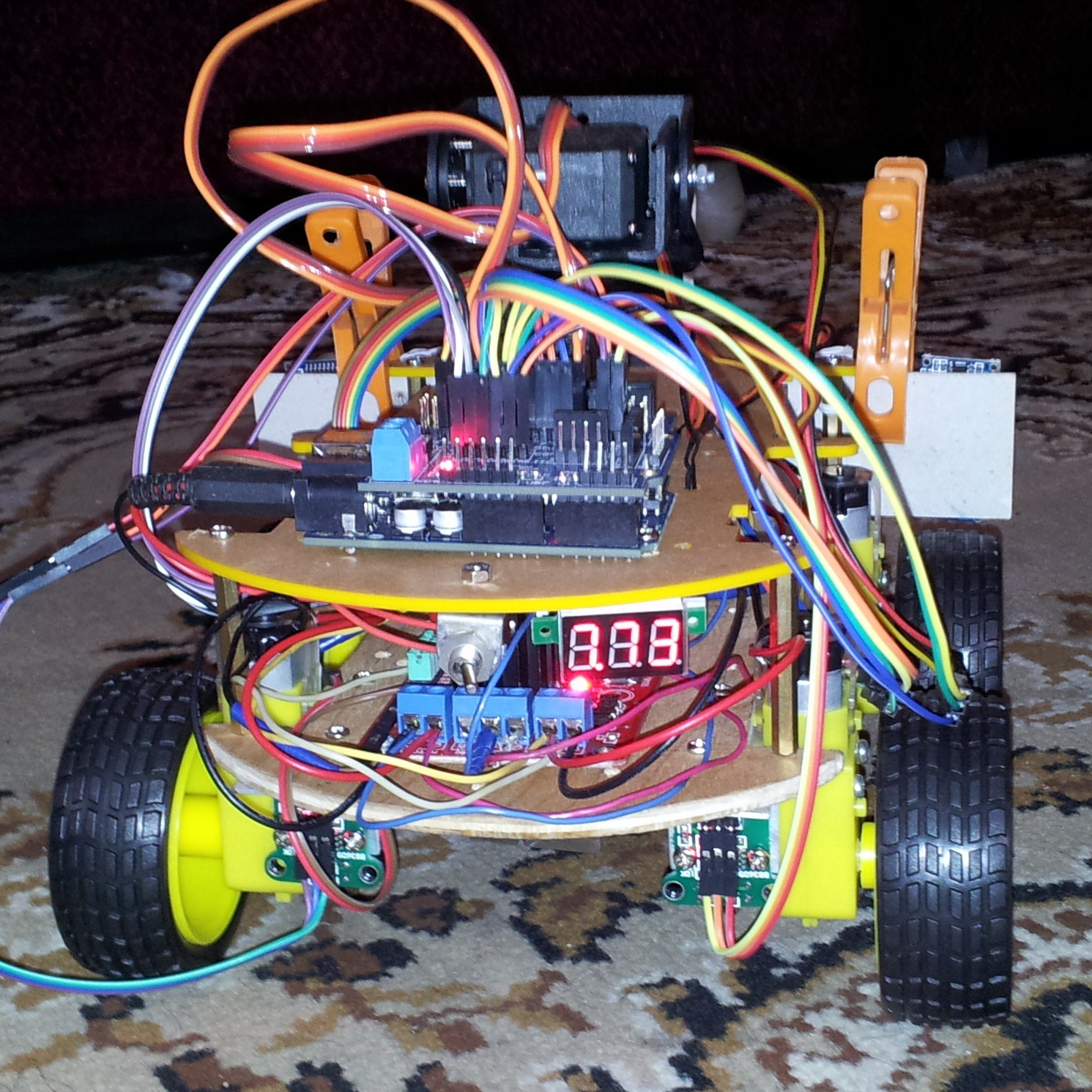
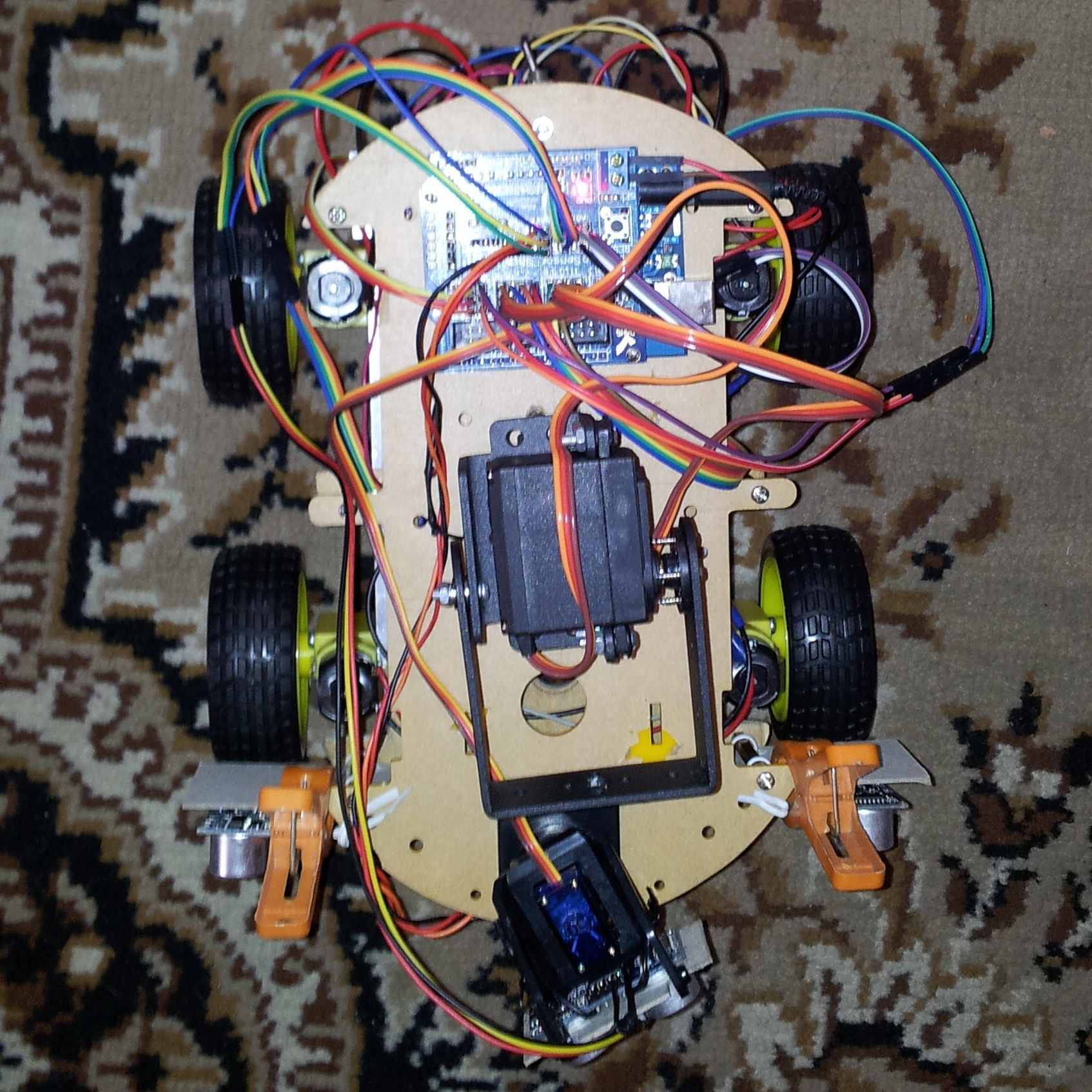
At the moment, the robot drives under control from the phone or in automatic mode through range finders. I understand quietly with android programming, as I plan to transfer there all brain activity as it were.
There are also a number of problems / tasks that have not yet been resolved. In particular, for fully autonomous movement, there was not enough ultrasonic and infrared rangefinders, the robot still sometimes comes up against obstacles. There are ideas how to solve this problem, but this will require a radical rework of the robot, so for now I’m thinking.
I plan to make an open-source project for the design of the robot and software, to make lessons on how to build and program the robot from scratch.
I will keep a regular video blog on improving the robot and write articles here, so support me and write in comments on what topic to write the next article, make a video.
PS: Drawings, dimensions, source codes will publish later in the group https://vk.com/club23358759
Source: https://habr.com/ru/post/219659/
All Articles