MARCO home robot
Hello, dear Habr.
Recently, I became involved in robotics, namely personal. Many people, including myself, consider this direction to be quite promising. In the words of Dmitry Grishin, personal robotics may well be the very Next Big Thing, standing on a par with computers, the Internet, WWW, social. networks and mobile applications.
I'm a fan of robots and science fiction related to them, and as is usually the case, it all started with a project for myself - creating my own robot, in order to test AI algorithms on it, and so on. Since I prefer to work with code rather than hardware, I thought to buy a ready-made robot and work with it, but, unfortunately, I did not find a suitable one on the market.
')
Of those that were, attention was attracted the most by Qbo from Thecorpora and PR2 from Willow Garage. In my opinion, these are the most relevant projects for a home robot. But I was not going to pay 4000 € (Qbo) for the robot, so I had to create it myself.
I will say right away that I was very much with electronics, and therefore I tried to find people who could help with this. Familiar electronics engineers helped, for the most part, only with advice, as they were busy with their projects. Rummaging a little, I realized that not everything is as scary as it seemed at first glance. And in general, in the process of studying and developing a project, I came to the same conclusion as I got when studying programming: it’s easier to study something and use the knowledge gained than to contact a person who has this knowledge (perhaps this is true only in my case, but it perfectly reduces the time spent on finding people and increases the degree of control and competence in the project).
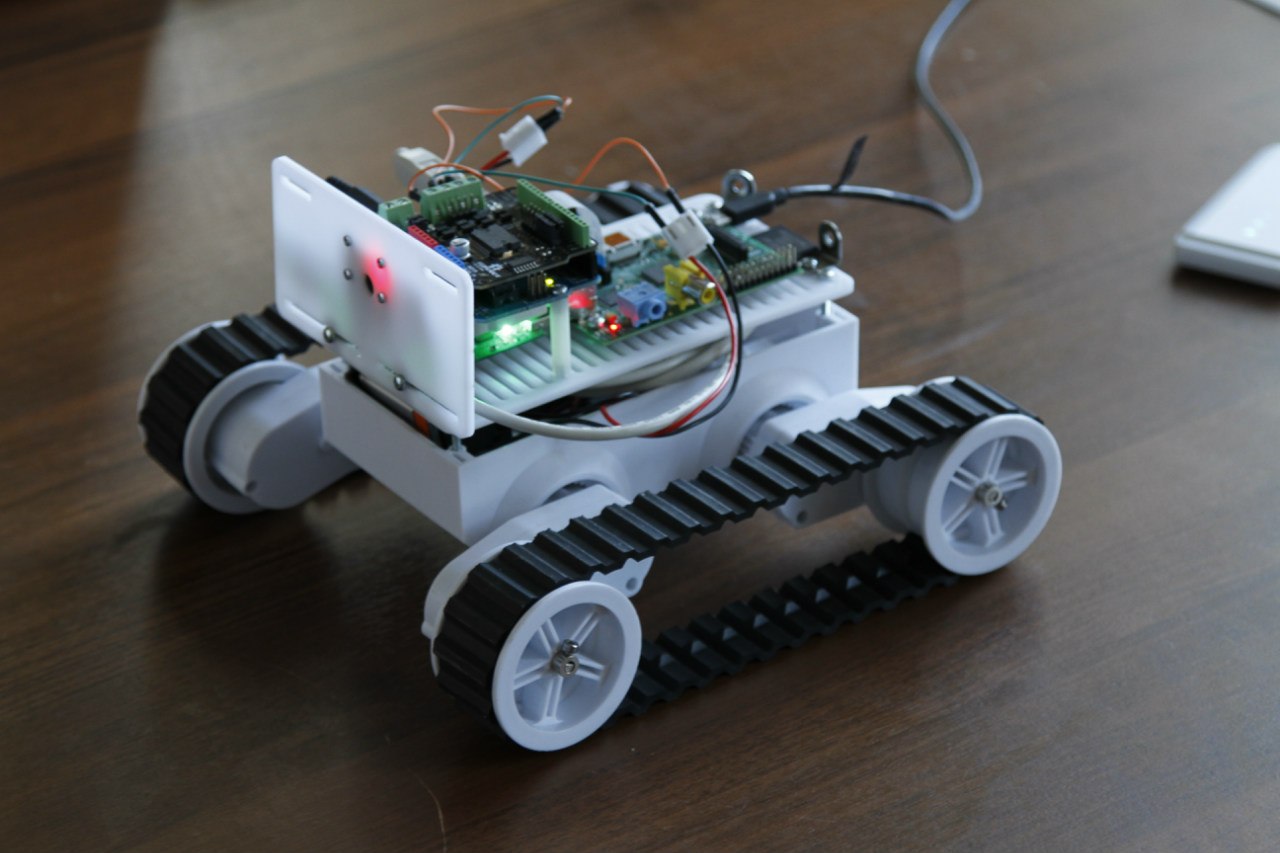
Actually, it all started with the basics: Arduino and wheeled platform.
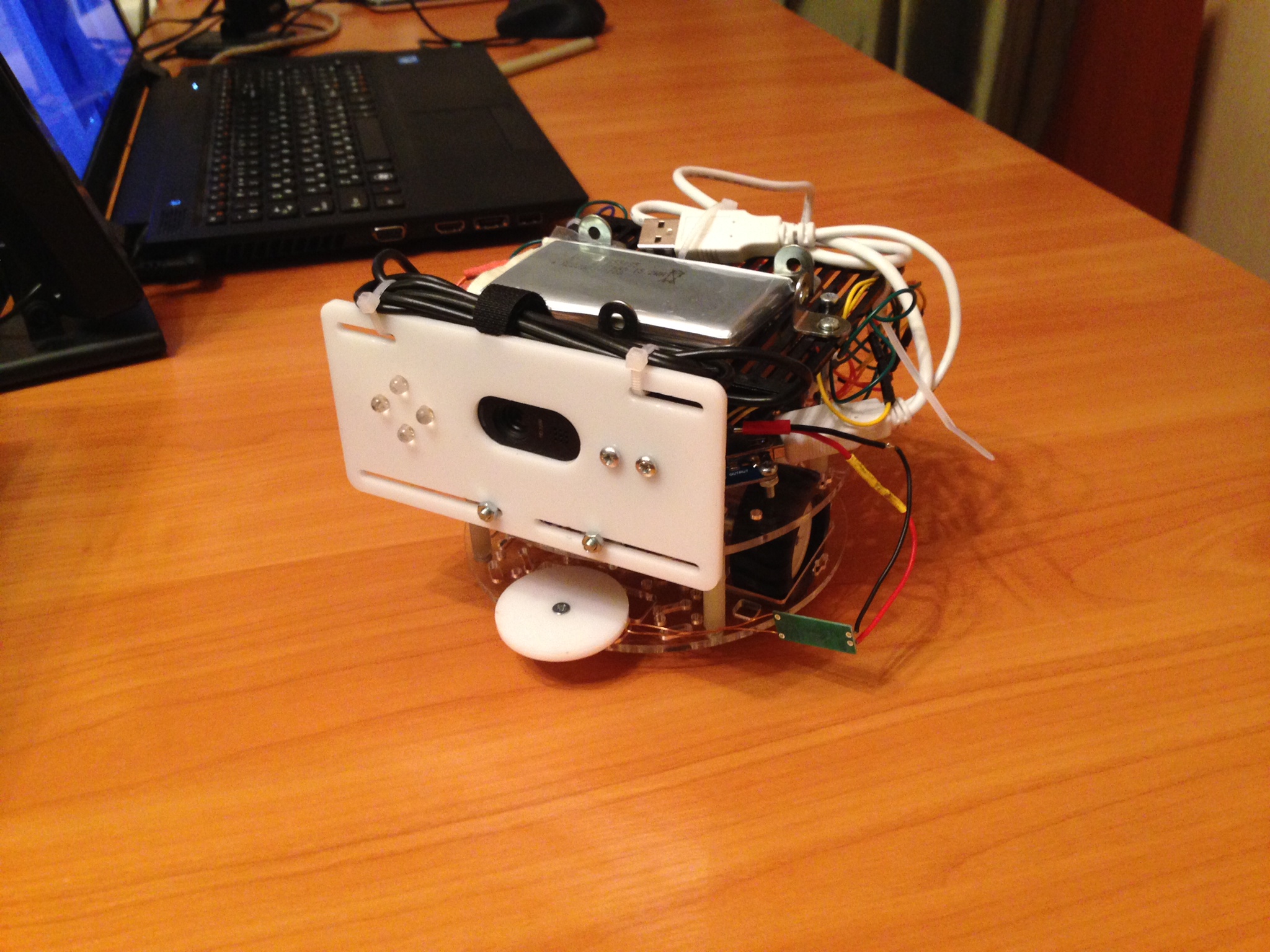
This was done fairly quickly, and I needed the next challenge. I decided to increase the abilities of the robot, and connected, a kind of, “high-level brains”, namely a single-board PC (I took it with the largest community at that time - Raspberry Pi). Adding to it a finished chassis (so as not to suffer with the attachments of motors and encoders and the like) and cutting the necessary parts on the laser machine from plexiglass, I got a simple telepresence robot.
It is time to do voice recognition (and who does not want to have his own Jarvis at home :)). I chose Julius .
He worked perfectly with the English language model out of the box, but as it turned out, it was rather difficult to make an acceptable language model of the Russian language, so I switched to the Google Speech API. Sox and the python script with a few lines of code allowed us to get the desired functionality.
Next came the issue of autonomous power. I did not want to run after the robot and charge it when necessary. He must drive up to the docking station and charge when needed. I settled on Li-Po Rider'e Pro - this made it possible to charge the battery and at the same time power the robot.
At this stage, the development of a robot for itself ended, and the development of the concept of a robot as a product began.
In a conversation with a friend, I accidentally popped up a topic about a robot, and she noticed that it would be nice if you could connect to it from anywhere and see what was happening at home (specifically in her case, if the iron was turned off).
What gave food for thought and impetus for a little marketing research. After interviewing several dozen of my friends and not so much, I received a sample of 5 points, which made up the primary set of characteristics for the MARCO home robot:
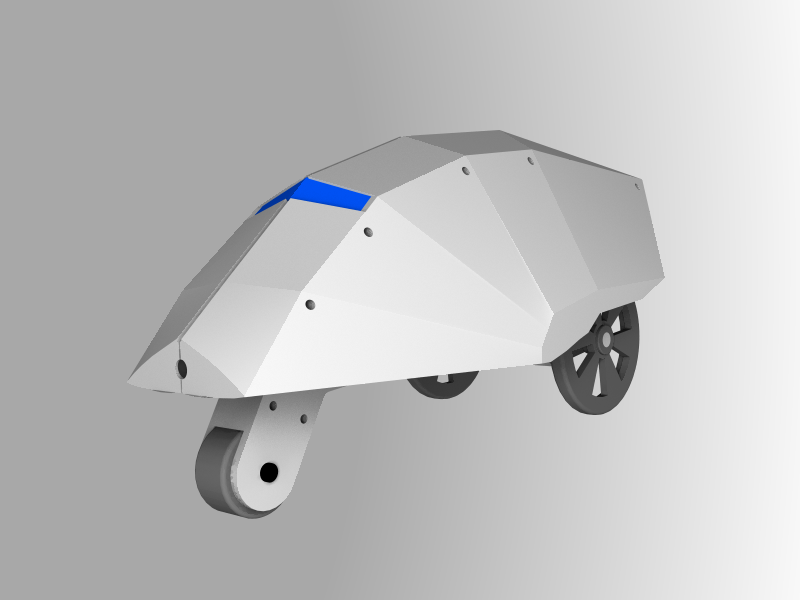
At the moment, work is underway to finalize the prototype, the final design and form factor of the robot.
I believe that robots will become a full-fledged part of our life, like smartphones, coffee makers, refrigerators, computers and the like, but I don’t think that this will happen in the next couple of years. But integration into modern life will begin with such robots as MARCO - simple, cheap, and daily facilitating any aspect of modern human life.
Recently, I became involved in robotics, namely personal. Many people, including myself, consider this direction to be quite promising. In the words of Dmitry Grishin, personal robotics may well be the very Next Big Thing, standing on a par with computers, the Internet, WWW, social. networks and mobile applications.
I'm a fan of robots and science fiction related to them, and as is usually the case, it all started with a project for myself - creating my own robot, in order to test AI algorithms on it, and so on. Since I prefer to work with code rather than hardware, I thought to buy a ready-made robot and work with it, but, unfortunately, I did not find a suitable one on the market.
')
Of those that were, attention was attracted the most by Qbo from Thecorpora and PR2 from Willow Garage. In my opinion, these are the most relevant projects for a home robot. But I was not going to pay 4000 € (Qbo) for the robot, so I had to create it myself.
Story
I will say right away that I was very much with electronics, and therefore I tried to find people who could help with this. Familiar electronics engineers helped, for the most part, only with advice, as they were busy with their projects. Rummaging a little, I realized that not everything is as scary as it seemed at first glance. And in general, in the process of studying and developing a project, I came to the same conclusion as I got when studying programming: it’s easier to study something and use the knowledge gained than to contact a person who has this knowledge (perhaps this is true only in my case, but it perfectly reduces the time spent on finding people and increases the degree of control and competence in the project).
Actually, it all started with the basics: Arduino and wheeled platform.
This was done fairly quickly, and I needed the next challenge. I decided to increase the abilities of the robot, and connected, a kind of, “high-level brains”, namely a single-board PC (I took it with the largest community at that time - Raspberry Pi). Adding to it a finished chassis (so as not to suffer with the attachments of motors and encoders and the like) and cutting the necessary parts on the laser machine from plexiglass, I got a simple telepresence robot.
It is time to do voice recognition (and who does not want to have his own Jarvis at home :)). I chose Julius .
He worked perfectly with the English language model out of the box, but as it turned out, it was rather difficult to make an acceptable language model of the Russian language, so I switched to the Google Speech API. Sox and the python script with a few lines of code allowed us to get the desired functionality.
Next came the issue of autonomous power. I did not want to run after the robot and charge it when necessary. He must drive up to the docking station and charge when needed. I settled on Li-Po Rider'e Pro - this made it possible to charge the battery and at the same time power the robot.
At this stage, the development of a robot for itself ended, and the development of the concept of a robot as a product began.
Product
In a conversation with a friend, I accidentally popped up a topic about a robot, and she noticed that it would be nice if you could connect to it from anywhere and see what was happening at home (specifically in her case, if the iron was turned off).
What gave food for thought and impetus for a little marketing research. After interviewing several dozen of my friends and not so much, I received a sample of 5 points, which made up the primary set of characteristics for the MARCO home robot:
- Autonomy
Smartphones, tablets, laptops, mobile phones. Also a robot to charge? No, thank you. The robot must be autonomous and recharge when needed. - Safety sensors
Many want the functionality of a smart home, but not everyone is willing to pay for it. Someone does not want to alter the new repair in the apartment. Someone rents a home, and the owner does not allow anything to do with the apartment. Thus, a robot can become, in its own way, a “non-invasive” solution of home automation. Humidity, temperature, smoke, propane sensors can transmit information about the condition of your house at any time, on demand, and in the event of an emergency, the robot can immediately inform about it. - Remote control
Strange in my opinion, but as it turned out, it was the most requested functionality in the survey. On the one hand, it would be interesting to someone from the point of view of the opportunity to show off in front of friends (to manage a home robot from a bar on an iPhone), for someone it would be interesting to have constant monitoring of the apartment, children, cottage, etc. It turned out that the “iron dilemma” (whether to go back home and check whether the iron is turned off or not) is quite relevant among urban residents. - Voice control
Quite a few people are interested in this functionality, but I decided to leave it. - Building a room map
Many ideas of application programs run into the navigation system and the availability of the floor plan in which the robot is located. Moreover, quite a lot of people in the survey wanted to know and visually observe where the robot is in the apartment.
At the moment, work is underway to finalize the prototype, the final design and form factor of the robot.
I believe that robots will become a full-fledged part of our life, like smartphones, coffee makers, refrigerators, computers and the like, but I don’t think that this will happen in the next couple of years. But integration into modern life will begin with such robots as MARCO - simple, cheap, and daily facilitating any aspect of modern human life.
Source: https://habr.com/ru/post/203208/
All Articles