How does a robot vacuum cleaner?
Do you know that every third vacuum cleaner bought in Spain is a robot vacuum cleaner? Demand in Russia for these devices is also growing from month to month. Prices vary on average from 10,000 to 30,000 rubles. What is this popular gadget and how is it built? We will answer these questions in this article. Put the Yujin Robot iClebo Arte mid-range robot vacuum cleaner on the operating table and start exploring its insides. It sounds scary, but I assure you, the article is suitable even for the category of readers 0+.

 A camera is located on the upper part of the body, it helps to build a room map, and lets the robot know where it was already and where it has not yet been removed. Also, with its help, the robot finds the shortest path from the end of the cleaning to the start (base for recharging). In the photo you can see the LCD touch screen with control buttons and icons, a bumper with a set of sensors, a dust collector. Infrared distance sensors are located on the bumper, with their help the robot “sees” obstacles and tries not to touch them. The sensors are not located across the entire surface of the bumper, so when the robot hits an obstacle at an angle, the robot touches it, and then the mechanical collision sensors are triggered. In this case, the vacuum cleaner changes its direction according to a given motion algorithm. The iClebo has an optional fourth sensor on the top of the bumper. With it, the robot determines the ability to drive under the furniture and not get stuck. The dust collector is removed by pressing a button on the case and does not have any bags for collecting dust, as well as no electromechanical parts. Dust collector and filter can be rinsed under water. The suction mechanism is located directly inside the robot.
A camera is located on the upper part of the body, it helps to build a room map, and lets the robot know where it was already and where it has not yet been removed. Also, with its help, the robot finds the shortest path from the end of the cleaning to the start (base for recharging). In the photo you can see the LCD touch screen with control buttons and icons, a bumper with a set of sensors, a dust collector. Infrared distance sensors are located on the bumper, with their help the robot “sees” obstacles and tries not to touch them. The sensors are not located across the entire surface of the bumper, so when the robot hits an obstacle at an angle, the robot touches it, and then the mechanical collision sensors are triggered. In this case, the vacuum cleaner changes its direction according to a given motion algorithm. The iClebo has an optional fourth sensor on the top of the bumper. With it, the robot determines the ability to drive under the furniture and not get stuck. The dust collector is removed by pressing a button on the case and does not have any bags for collecting dust, as well as no electromechanical parts. Dust collector and filter can be rinsed under water. The suction mechanism is located directly inside the robot.

We turn over the robot vacuum cleaner. Two leading side wheels set the movement of the device, the front small wheel auxiliary without drive. On its axis is a special magnetic sensor. It is necessary to measure the distance traveled by the robot. The wheel does not rotate around its horizontal axis, it is not necessary. The robot changes its direction on the spot by transferring the moment to one of the side wheels, that is, it does not affect maneuverability.
Under a small plastic cover is a Li-Ion battery with a capacity of 2200 mAh. In this sample, two side brushes, from a practical point of view, it helps to capture a large area in one passage. In order to get to the plinth, one side brush is enough, until a single robot vacuum cleaner reaches the corners completely. Two side brushes direct garbage to the main turbo brush, which in turn directs it to the dust collector. The suction module helps to suck debris from the turbo brush. The rubber scraper located on the dust collector picks up large debris. According to this principle, all robot vacuum cleaners are built in the absence of a large suction force. The result of cleaning on smooth floors with this design is very good, on carpets - worse, the robot can not suck the dust from the villi.
Next to the dust collector you can see two indentations - grooves for the polisher. This vacuum cleaner has a floor cleaning function. The base of the mop is attached to the bottom, the robot and vacuum cleaner, and wipes. Microfiber cloth can be moistened with water before starting. In the process of work, it cannot be wetted anymore, the robot discards the room map and the current cleaning program when it is torn off the floor. The napkin helps to collect fine dust, including flour, fine sand, salt. For a full floor cleaning it will not work.
')

It's time to take up the tools and see what a robot vacuum cleaner looks like from the inside. We take out the dust collector and the main turbo brush. Put the robot vacuum cleaner on the front panel and see 5 bolt holes. The sixth hole is under the sticker-seal with the inscription QC Passed.

Next, you need to carefully detach the ends of the bumper. There should not be any particular difficulties, the plastic is quite elastic and durable.

Placing iClebo face to the ceiling, we pull out the decorative panel of the robot. To do this, pull the edge of the panel towards you and upwards. So we got access to the filling of the robot cleaner.
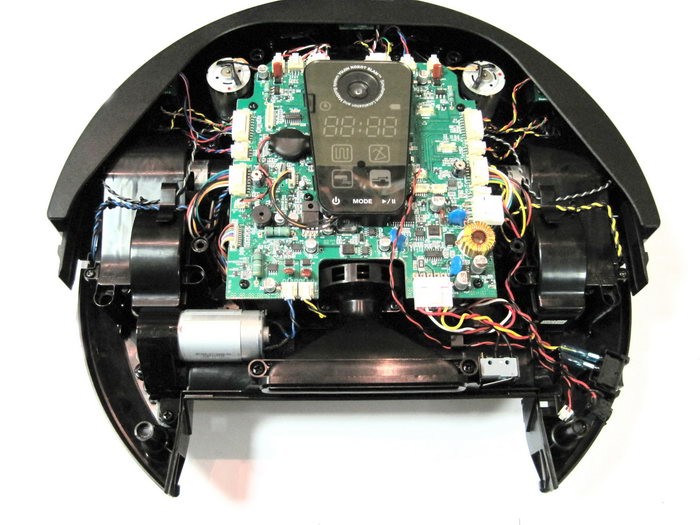
The naked eye can see the main elements. The robot has 6 electric drives: two for side brushes, one for a turbo brush, one for a suction module (hidden under a plastic casing), two are built into the body of the side wheels. Right under the LCD screen of the robot vacuum cleaner is its “brain” - the Abov MC81F4216D microcontroller. Next to the motherboard and the place of installation of the dust collector is a special sensor. When it closes, the iClebo “understands” that the dust collector is connected, otherwise the robot cleaner will not budge and give an error on the display.
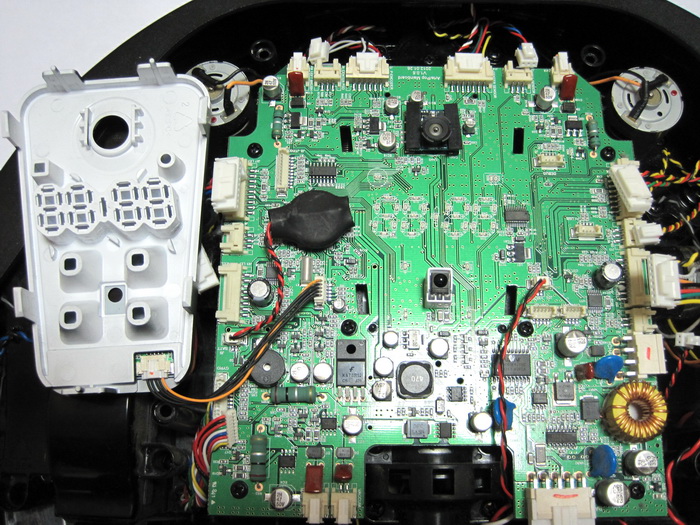
Remove the LCD screen. We see the camera, IR receiver under it. In the center of the LEDs for the screen.
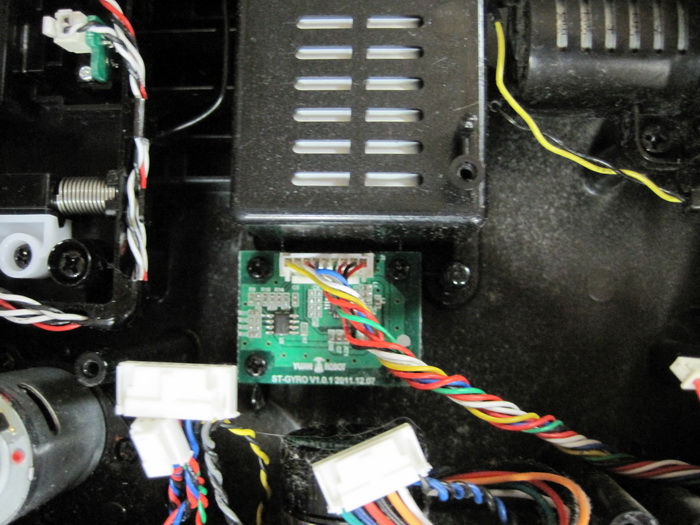
We release the motherboard from the set of contacts and see the gyroscope, which is needed to determine the angle of rotation of the robot.
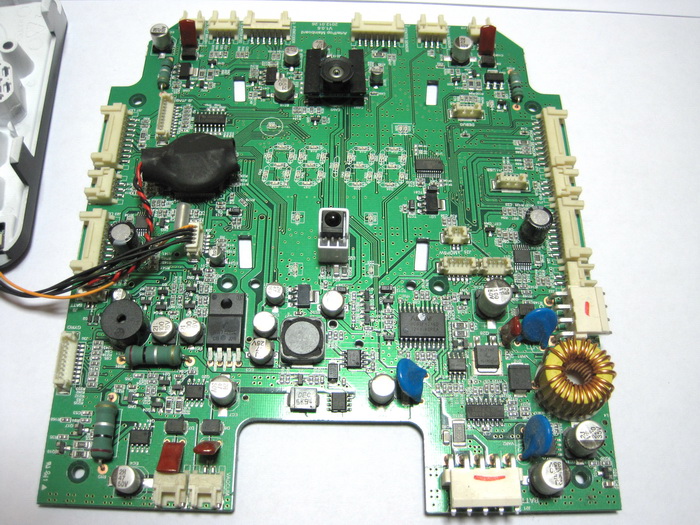
And, finally, we will release the motherboard itself from all contacts.
What is such a device as a robot vacuum cleaner. The block diagram of the device is presented below:
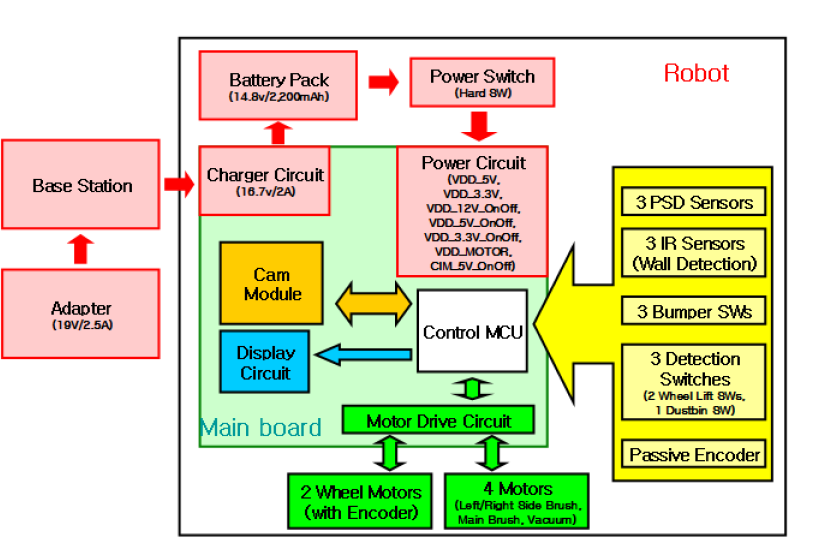
We have a motherboard (Main board) with a camera module, a display, a control module for side-wheel electric drives, etc. A 19-volt adapter, through the base for charging the robot, charges the lithium-ion battery that powers all other circuit elements. For the clock and the timer, an additional battery-tablet on the motherboard is used. Three sensors for determining the height difference (3 PSD Sensors) are located at the bottom of the device case. Three infrared sensors (3 IR Sensors) are located directly on the bumper itself. When an obstacle is detected, the robot vacuum cleaner changes its direction. If the IR sensor does not work, but the robot still rests against an obstacle, a mechanical bumper sensor (3 Bumper SWs) is triggered. The diagram also shows 3 Detection Switches - two sensors determine whether the wheels have come off the floor, and the third dust collector sensor. Passive Encoder - a sensor located near the front axle of the wheel to determine the distance traveled.
In order to understand where the robot has already been removed, and where not yet, it turns out information from all of the above sensors and sensors. It measures the distance traveled and the angle of rotation, and with the help of a camera and obstacle sensors, it “understands” where the boundaries of the cleaned area are. Future home vacuum cleaning robots will use cameras to fully construct a map of the room, determine the presence of people and animals in the room and, most likely, it will be possible to indicate to the robot its further actions or to change the mode of operation.
It remains to deal with the wheels. Remove the side wheel. A sensor on the side of the wheel helps the robot determine its position in space, namely: is it on the floor? If the contact is open, the robot stops working.

Having examined the wheel housing, we see such a gearbox.

Of course, all of these components are controlled by software, and without a correctly written program code, the robot will not function. In this vacuum cleaner, you can update the software, but only experienced users will be able to do this, since a programmer is needed to rewrite the vacuum cleaner’s “brains”. The ST-Link programmer is used. The main part of the robot firmware is implemented using this adapter, via the J2 JTAG connector on the board, and only the navigation module is updated via J11 USB. Moreover, both parts of the firmware are interrelated.
The robot vacuum cleaner is a complicated technical device and their prices are relatively high, especially when compared to household vacuum cleaners for 3,000 rubles. Probably, when a robot can manage with a pair of cameras to perform all navigation actions, the cost of production will noticeably fall, and hence the final cost of the device. In the meantime, buyers pay for the most part for convenience: set a timer, go to work, the robot cleans up in your absence and automatically returns to the base. Well, of course, laziness is the engine of progress. People usually do not want to do anything, it is better for them to let others do all the work. Just home robots for this and developed.
A camera is located on the upper part of the body, it helps to build a room map, and lets the robot know where it was already and where it has not yet been removed. Also, with its help, the robot finds the shortest path from the end of the cleaning to the start (base for recharging). In the photo you can see the LCD touch screen with control buttons and icons, a bumper with a set of sensors, a dust collector. Infrared distance sensors are located on the bumper, with their help the robot “sees” obstacles and tries not to touch them. The sensors are not located across the entire surface of the bumper, so when the robot hits an obstacle at an angle, the robot touches it, and then the mechanical collision sensors are triggered. In this case, the vacuum cleaner changes its direction according to a given motion algorithm. The iClebo has an optional fourth sensor on the top of the bumper. With it, the robot determines the ability to drive under the furniture and not get stuck. The dust collector is removed by pressing a button on the case and does not have any bags for collecting dust, as well as no electromechanical parts. Dust collector and filter can be rinsed under water. The suction mechanism is located directly inside the robot.We turn over the robot vacuum cleaner. Two leading side wheels set the movement of the device, the front small wheel auxiliary without drive. On its axis is a special magnetic sensor. It is necessary to measure the distance traveled by the robot. The wheel does not rotate around its horizontal axis, it is not necessary. The robot changes its direction on the spot by transferring the moment to one of the side wheels, that is, it does not affect maneuverability.
Under a small plastic cover is a Li-Ion battery with a capacity of 2200 mAh. In this sample, two side brushes, from a practical point of view, it helps to capture a large area in one passage. In order to get to the plinth, one side brush is enough, until a single robot vacuum cleaner reaches the corners completely. Two side brushes direct garbage to the main turbo brush, which in turn directs it to the dust collector. The suction module helps to suck debris from the turbo brush. The rubber scraper located on the dust collector picks up large debris. According to this principle, all robot vacuum cleaners are built in the absence of a large suction force. The result of cleaning on smooth floors with this design is very good, on carpets - worse, the robot can not suck the dust from the villi.
Next to the dust collector you can see two indentations - grooves for the polisher. This vacuum cleaner has a floor cleaning function. The base of the mop is attached to the bottom, the robot and vacuum cleaner, and wipes. Microfiber cloth can be moistened with water before starting. In the process of work, it cannot be wetted anymore, the robot discards the room map and the current cleaning program when it is torn off the floor. The napkin helps to collect fine dust, including flour, fine sand, salt. For a full floor cleaning it will not work.
')
It's time to take up the tools and see what a robot vacuum cleaner looks like from the inside. We take out the dust collector and the main turbo brush. Put the robot vacuum cleaner on the front panel and see 5 bolt holes. The sixth hole is under the sticker-seal with the inscription QC Passed.
Next, you need to carefully detach the ends of the bumper. There should not be any particular difficulties, the plastic is quite elastic and durable.
Placing iClebo face to the ceiling, we pull out the decorative panel of the robot. To do this, pull the edge of the panel towards you and upwards. So we got access to the filling of the robot cleaner.
The naked eye can see the main elements. The robot has 6 electric drives: two for side brushes, one for a turbo brush, one for a suction module (hidden under a plastic casing), two are built into the body of the side wheels. Right under the LCD screen of the robot vacuum cleaner is its “brain” - the Abov MC81F4216D microcontroller. Next to the motherboard and the place of installation of the dust collector is a special sensor. When it closes, the iClebo “understands” that the dust collector is connected, otherwise the robot cleaner will not budge and give an error on the display.
Remove the LCD screen. We see the camera, IR receiver under it. In the center of the LEDs for the screen.
We release the motherboard from the set of contacts and see the gyroscope, which is needed to determine the angle of rotation of the robot.
And, finally, we will release the motherboard itself from all contacts.
What is such a device as a robot vacuum cleaner. The block diagram of the device is presented below:
We have a motherboard (Main board) with a camera module, a display, a control module for side-wheel electric drives, etc. A 19-volt adapter, through the base for charging the robot, charges the lithium-ion battery that powers all other circuit elements. For the clock and the timer, an additional battery-tablet on the motherboard is used. Three sensors for determining the height difference (3 PSD Sensors) are located at the bottom of the device case. Three infrared sensors (3 IR Sensors) are located directly on the bumper itself. When an obstacle is detected, the robot vacuum cleaner changes its direction. If the IR sensor does not work, but the robot still rests against an obstacle, a mechanical bumper sensor (3 Bumper SWs) is triggered. The diagram also shows 3 Detection Switches - two sensors determine whether the wheels have come off the floor, and the third dust collector sensor. Passive Encoder - a sensor located near the front axle of the wheel to determine the distance traveled.
In order to understand where the robot has already been removed, and where not yet, it turns out information from all of the above sensors and sensors. It measures the distance traveled and the angle of rotation, and with the help of a camera and obstacle sensors, it “understands” where the boundaries of the cleaned area are. Future home vacuum cleaning robots will use cameras to fully construct a map of the room, determine the presence of people and animals in the room and, most likely, it will be possible to indicate to the robot its further actions or to change the mode of operation.
It remains to deal with the wheels. Remove the side wheel. A sensor on the side of the wheel helps the robot determine its position in space, namely: is it on the floor? If the contact is open, the robot stops working.
Having examined the wheel housing, we see such a gearbox.
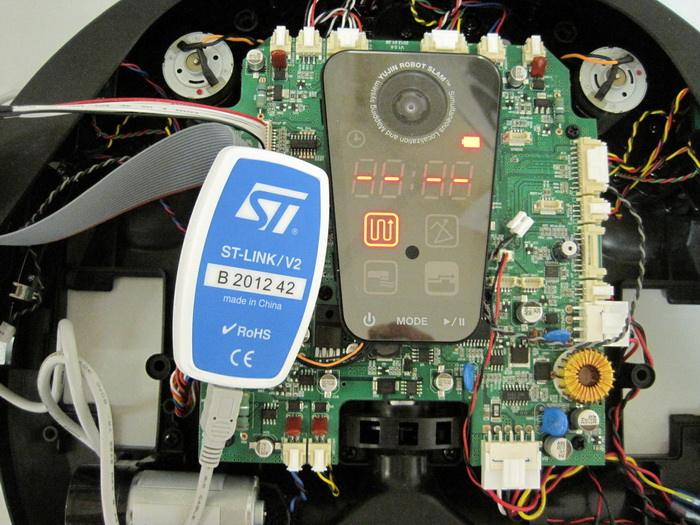
Of course, all of these components are controlled by software, and without a correctly written program code, the robot will not function. In this vacuum cleaner, you can update the software, but only experienced users will be able to do this, since a programmer is needed to rewrite the vacuum cleaner’s “brains”. The ST-Link programmer is used. The main part of the robot firmware is implemented using this adapter, via the J2 JTAG connector on the board, and only the navigation module is updated via J11 USB. Moreover, both parts of the firmware are interrelated.
The robot vacuum cleaner is a complicated technical device and their prices are relatively high, especially when compared to household vacuum cleaners for 3,000 rubles. Probably, when a robot can manage with a pair of cameras to perform all navigation actions, the cost of production will noticeably fall, and hence the final cost of the device. In the meantime, buyers pay for the most part for convenience: set a timer, go to work, the robot cleans up in your absence and automatically returns to the base. Well, of course, laziness is the engine of progress. People usually do not want to do anything, it is better for them to let others do all the work. Just home robots for this and developed.
Source: https://habr.com/ru/post/199368/
All Articles