"Boost.Asio C ++ Network Programming". Chapter 3: Echo Server / Client
Hello!
I continue to translate the book of John Torjo "Boost.Asio C ++ Network Programming".
Content:
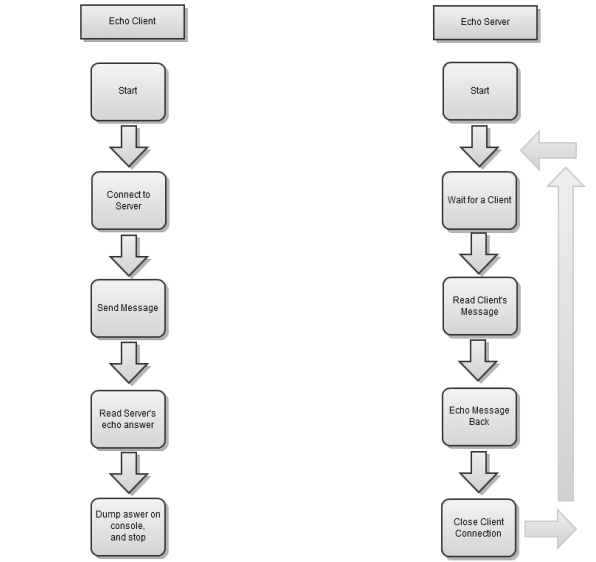
In this chapter, we will implement a small client / server application, which is likely to be the simplest client / server application. This application is an echo server, which returns to the client what he wrote to him, and then closes the client connection. The server can work with any number of clients. When a new client connects, it sends a message. The server receives the entire message and sends it back. After that, it closes the connection.
Thus, each echo client connects to the server, sends a message, and reads what the server answered, making sure that this is the same message that it sent, ends communication with the server.
First we will implement a synchronous application, and then asynchronous, so you can easily compare them:
')
Not all of the code will be given here, but only parts of it, the entire code can be viewed at the link at the end of the article.
For TCP, we can have an additional advantage; each message ends with a '\ n'. Writing a synchronous server / client echo is very simple.
We will give examples of programs such as a synchronous client, a synchronous server, an asynchronous client, and an asynchronous server.
In most non-trivial examples, the client code is usually much simpler than the server (since the server must deal with several clients).
The following example is an exception to the rule:
Notice the
You have noticed that for reading we use the free function
The third argument to the read () function is the final handler. It will return 0 if the message is fully read. Otherwise, the maximum buffer size is returned, which can be read in the next step (before the
In
Note that since we are dealing with a synchronous client, there is no need to call
Synchronous echo server is quite simple to write, as shown in the following code snippet:
All server logic is wrapped in
Note again that, since we are working synchronously, there is no need to call
As soon as we start working asynchronously, the code becomes a bit more complicated. We will model the
Looking at the following code snippets in this section, you will notice that each asynchronous operation starts a new asynchronous operation, keeping service.run () in operation.
First, the main functions:
We want to always use shared pointers on
We have basic functions such as
As explained earlier, the following lines are very different:
In the first case, we correctly create the final
In the latter case, we incorrectly create the final handler. By the time the
To read and write to the socket, we will use the following code fragment:
The
And the most important functions that contain the basic logic of the class:
After that we connect and send a message to the server,
We will send three messages to the server just to make it all the more interesting:
In the previous code snippet, the following code will be generated:
As shown below, the basic functions are very similar to those of the asynchronous client:
This is a very simple echo server, there is no need for the
The functions
The main logic of the class is contained in the
Work with clients is as follows:
Each time a client connects to the server, a
Since not all messages reach the recipient in UDP, we have no guarantee that the message has come completely. Since we are working on UDP, then every message that we receive, we simply output without closing the socket (on the server side).
UDP Echo Client is a bit simpler than TCP Echo Client:
All logic is contained in the
UDP Echo Server is the easiest server to write:
Everything is very simple here and speaks for itself.
Let's leave the asynchronous UDP server and client to write to the reader as an exercise.
We wrote several applications and finally got to work with Boost.Asio. These applications are very good to get started with this library.
In the next chapter, we will create more complex client / server applications, we will learn to avoid errors such as memory leaks, deadlocks, and so on.
Thank you all very much!
Resources for this article: link
I continue to translate the book of John Torjo "Boost.Asio C ++ Network Programming".
Content:
- Chapter 1: Getting Started with Boost.Asio
- Chapter 2: Boost.Asio Basics
- Chapter 3: Echo Server / Client
- Chapter 4: Client and Server
- Chapter 5: Synchronous vs. Asynchronous
- Chapter 6: Boost.Asio - Other Features
- Chapter 7: Boost.Asio - additional topics
In this chapter, we will implement a small client / server application, which is likely to be the simplest client / server application. This application is an echo server, which returns to the client what he wrote to him, and then closes the client connection. The server can work with any number of clients. When a new client connects, it sends a message. The server receives the entire message and sends it back. After that, it closes the connection.
Thus, each echo client connects to the server, sends a message, and reads what the server answered, making sure that this is the same message that it sent, ends communication with the server.
First we will implement a synchronous application, and then asynchronous, so you can easily compare them:
')
Not all of the code will be given here, but only parts of it, the entire code can be viewed at the link at the end of the article.
TCP echo server / client
For TCP, we can have an additional advantage; each message ends with a '\ n'. Writing a synchronous server / client echo is very simple.
We will give examples of programs such as a synchronous client, a synchronous server, an asynchronous client, and an asynchronous server.
TCP synchronous client
In most non-trivial examples, the client code is usually much simpler than the server (since the server must deal with several clients).
The following example is an exception to the rule:
ip::tcp::endpoint ep( ip::address::from_string("127.0.0.1"), 8001); size_t read_complete(char * buf, const error_code & err, size_t bytes) { if ( err) return 0; bool found = std::find(buf, buf + bytes, '\n') < buf + bytes; // we read one-by-one until we get to enter, no buffering return found ? 0 : 1; } void sync_echo(std::string msg) { msg += "\n"; ip::tcp::socket sock(service); sock.connect(ep); sock.write_some(buffer(msg)); char buf[1024]; int bytes = read(sock, buffer(buf), boost::bind(read_complete,buf,_1,_2)); std::string copy(buf, bytes - 1); msg = msg.substr(0, msg.size() - 1); std::cout << "server echoed our " << msg << ": "<< (copy == msg ? "OK" : "FAIL") << std::endl; sock.close(); } int main(int argc, char* argv[]) { char* messages[] = { "John says hi", "so does James", "Lucy just got home", "Boost.Asio is Fun!", 0 }; boost::thread_group threads; for ( char ** message = messages; *message; ++message) { threads.create_thread( boost::bind(sync_echo, *message)); boost::this_thread::sleep( boost::posix_time::millisec(100)); } threads.join_all(); } Notice the
sync_echo function. It contains all the logic to connect to the server, sends a message to it and waits for a return response.You have noticed that for reading we use the free function
read() , because we want to receive the entire message before the '\ n' character. The sock.read_some() function will not be enough, since it will read only what is available, but not necessarily the entire message.The third argument to the read () function is the final handler. It will return 0 if the message is fully read. Otherwise, the maximum buffer size is returned, which can be read in the next step (before the
read completed). In our case, it will always return 1, because we don’t want to mistakenly read more than we need.In
main() we create several threads; one thread for each message that the client sends, and wait until they complete. If you run the program, you will see the following output: server echoed our John says hi: OK server echoed our so does James: OK server echoed our Lucy just got home: OK server echoed our Boost.Asio is Fun!: OK Note that since we are dealing with a synchronous client, there is no need to call
service.run() .TCP synchronous server
Synchronous echo server is quite simple to write, as shown in the following code snippet:
io_service service; size_t read_complete(char * buff, const error_code & err, size_t bytes) { if ( err) return 0; bool found = std::find(buff, buff + bytes, '\n') < buff + bytes; // we read one-by-one until we get to enter, no buffering return found ? 0 : 1; } void handle_connections() { ip::tcp::acceptor acceptor(service, ip::tcp::endpoint(ip::tcp::v4(),8001)); char buff[1024]; while ( true) { ip::tcp::socket sock(service); acceptor.accept(sock); int bytes = read(sock, buffer(buff), boost::bind(read_complete,buff,_1,_2)); std::string msg(buff, bytes); sock.write_some(buffer(msg)); sock.close(); } } int main(int argc, char* argv[]) { handle_connections(); } All server logic is wrapped in
handle_connections() . Since it is single-threaded, we accept the new client, read the message that it sent, send it back, and then wait for the next client. For example, if you connect two clients at once, then the second will have to wait while the server serves the first client.Note again that, since we are working synchronously, there is no need to call
service.run() .TCP asynchronous client
As soon as we start working asynchronously, the code becomes a bit more complicated. We will model the
connection class, as shown in the second chapter .Looking at the following code snippets in this section, you will notice that each asynchronous operation starts a new asynchronous operation, keeping service.run () in operation.
First, the main functions:
#define MEM_FN(x) boost::bind(&self_type::x, shared_from_this()) #define MEM_FN1(x,y) boost::bind(&self_type::x, shared_from_this(),y) #define MEM_FN2(x,y,z) boost::bind(&self_type::x, shared_from_this(),y,z) class talk_to_svr : public boost::enable_shared_from_this<talk_to_svr>,boost::noncopyable { typedef talk_to_svr self_type; talk_to_svr(const std::string & message) : sock_(service), started_(true),message_(message) {} void start(ip::tcp::endpoint ep) { sock_.async_connect(ep, MEM_FN1(on_connect,_1)); } public: typedef boost::system::error_code error_code; typedef boost::shared_ptr<talk_to_svr> ptr; static ptr start(ip::tcp::endpoint ep, const std::string & message) { ptr new_(new talk_to_svr(message)); new_->start(ep); return new_; } void stop() { if ( !started_) return; started_ = false; sock_.close(); } bool started() { return started_; } ... private: ip::tcp::socket sock_; enum { max_msg = 1024 }; char read_buffer_[max_msg]; char write_buffer_[max_msg]; bool started_; std::string message_; }; We want to always use shared pointers on
talk_to_svr , so that while there are asynchronous operations in the talk_to_svr instance, this instance remains alive. In order to avoid such errors as creating instances of talk_to_svr in the stack, we made the constructor private and forbade the copy constructor (inherited from boost::noncopyable ).We have basic functions such as
start(), stop() , and started() , which do only what their names say. To create a connection, simply call talk_to_svr::start(endpoint, message) . We also have buffers for reading and writing ( read_buffer_ and write_buffer_ ).As explained earlier, the following lines are very different:
// equivalent to "sock_.async_connect(ep, MEM_FN1(on_connect,_1));" sock_.async_connect(ep, boost::bind(&talk_to_svr::on_connect,shared_ptr_from_this(),_1)); sock_.async_connect(ep, boost::bind(&talk_to_svr::on_connect,this,_1)); In the first case, we correctly create the final
async_connect handler, it will save the shared pointer to the talk_to_server instance until it calls the final handler, thereby making sure that we are still alive when this happens.In the latter case, we incorrectly create the final handler. By the time the
talk_to_server instance is talk_to_server , it may already have been deleted!To read and write to the socket, we will use the following code fragment:
void do_read() { async_read(sock_, buffer(read_buffer_), MEM_FN2(read_complete,_1,_2), MEM_FN2(on_read,_1,_2)); } void do_write(const std::string & msg) { if ( !started() ) return; std::copy(msg.begin(), msg.end(), write_buffer_); sock_.async_write_some( buffer(write_buffer_, msg.size()), MEM_FN2(on_write,_1,_2)); } size_t read_complete(const boost::system::error_code & err, size_t bytes) { // similar to the one shown in TCP Synchronous Client } The
do_read() function first makes sure that we read the message from the server, after which on_read() called. The do_write() function first copies the message to the buffer (it is likely that msg may go out of scope and will eventually collapse), and then makes sure that the on_write() call occurs after the actual write.And the most important functions that contain the basic logic of the class:
void on_connect(const error_code & err) { if ( !err) do_write(message_ + "\n"); else stop(); } void on_read(const error_code & err, size_t bytes) { if ( !err) { std::string copy(read_buffer_, bytes - 1); std::cout << "server echoed our " << message_ << ": "<< (copy == message_ ? "OK" : "FAIL") << std::endl; } stop(); } void on_write(const error_code & err, size_t bytes) { do_read(); } After that we connect and send a message to the server,
do_write() . When the write operation is completed, on_write() is called, which initiates the do_read() function. When do_read() completed, do_read() is called, here we simply check that the message from the server is the same as what we sent to it and exit it.We will send three messages to the server just to make it all the more interesting:
int main(int argc, char* argv[]) { ip::tcp::endpoint ep( ip::address::from_string("127.0.0.1"), 8001); char* messages[] = { "John says hi", "so does James", "Lucy got home", 0 }; for ( char ** message = messages; *message; ++message) { talk_to_svr::start( ep, *message); boost::this_thread::sleep( boost::posix_time::millisec(100)); } service.run(); } In the previous code snippet, the following code will be generated:
server echoed our John says hi: OK server echoed our so does James: OK server echoed our Lucy just got home: OK TCP asynchronous server
As shown below, the basic functions are very similar to those of the asynchronous client:
class talk_to_client : public boost::enable_shared_from_this<talk_to_client>, boost::noncopyable { typedef talk_to_client self_type; talk_to_client() : sock_(service), started_(false) {} public: typedef boost::system::error_code error_code; typedef boost::shared_ptr<talk_to_client> ptr; void start() { started_ = true; do_read(); } static ptr new_() { ptr new_(new talk_to_client); return new_; } void stop() { if ( !started_) return; started_ = false; vsock_.close(); } ip::tcp::socket & sock() { return sock_;} ... private: ip::tcp::socket sock_; enum { max_msg = 1024 }; char read_buffer_[max_msg]; char write_buffer_[max_msg]; bool started_; }; This is a very simple echo server, there is no need for the
is_started() function. For each client, we simply read the message that he sent, send the same message back and close the connection.The functions
do_read(), do_write() and read_complete() exactly the same as in the asynchronous TCP client.The main logic of the class is contained in the
on_read() and on_write() functions: void on_read(const error_code & err, size_t bytes) { if ( !err) { std::string msg(read_buffer_, bytes); do_write(msg + "\n"); } stop(); } void on_write(const error_code & err, size_t bytes) { do_read(); } Work with clients is as follows:
ip::tcp::acceptor acceptor(service, ip::tcp::endpoint(ip::tcp::v4(), 8001)); void handle_accept(talk_to_client::ptr client, const error_code & err) { client->start(); talk_to_client::ptr new_client = talk_to_client::new_(); acceptor.async_accept(new_client->sock(), boost::bind(handle_accept,new_client,_1)); } int main(int argc, char* argv[]) { talk_to_client::ptr client = talk_to_client::new_(); acceptor.async_accept(client->sock(), boost::bind(handle_accept,client,_1)); service.run(); } Each time a client connects to the server, a
handle_accep t is handle_accep , which starts to read asynchronously from this client, and also asynchronously waits for a new client.UDP echo server / client
Since not all messages reach the recipient in UDP, we have no guarantee that the message has come completely. Since we are working on UDP, then every message that we receive, we simply output without closing the socket (on the server side).
UDP synchronous echo client
UDP Echo Client is a bit simpler than TCP Echo Client:
ip::udp::endpoint ep( ip::address::from_string("127.0.0.1"), 8001); void sync_echo(std::string msg) { ip::udp::socket sock(service, ip::udp::endpoint(ip::udp::v4(), 0) ); sock.send_to(buffer(msg), ep); char buff[1024]; ip::udp::endpoint sender_ep; int bytes = sock.receive_from(buffer(buff), sender_ep); std::string copy(buff, bytes); std::cout << "server echoed our " << msg << ": "<< (copy == msg ? "OK" : "FAIL") << std::endl; sock.close(); } int main(int argc, char* argv[]) { char* messages[] = { "John says hi", "so does James", "Lucy got home", 0 }; boost::thread_group threads; for ( char ** message = messages; *message; ++message) { threads.create_thread( boost::bind(sync_echo, *message)); boost::this_thread::sleep( boost::posix_time::millisec(100)); } threads.join_all(); } All logic is contained in the
synch_echo() function; connecting to the server, sending a message, receiving a response message from the server and closing the connection.UDP synchronous echo server
UDP Echo Server is the easiest server to write:
io_service service; void handle_connections() { char buff[1024]; ip::udp::socket sock(service, ip::udp::endpoint(ip::udp::v4(), 8001)); while ( true) { ip::udp::endpoint sender_ep; int bytes = sock.receive_from(buffer(buff), sender_ep); std::string msg(buff, bytes); sock.send_to(buffer(msg), sender_ep); } } int main(int argc, char* argv[]) { handle_connections(); } Everything is very simple here and speaks for itself.
Let's leave the asynchronous UDP server and client to write to the reader as an exercise.
Summary
We wrote several applications and finally got to work with Boost.Asio. These applications are very good to get started with this library.
In the next chapter, we will create more complex client / server applications, we will learn to avoid errors such as memory leaks, deadlocks, and so on.
Thank you all very much!
Resources for this article: link
Source: https://habr.com/ru/post/195386/
All Articles