How was the competition flying robots: flights and errors
Installing the drone on the starting position
A year ago, the competition began flying robots with a prize of 1 million rubles. At the start there were 536 applications. There were 237 participants at the first control point, 204 at the second, 72 at the third. 29 strongest participants reached the final. But only 14 teams and 4 individual participants reached the KROK test site on August 24 and 25 and fought for the prize. The total time of the final flight of their 18 drones is about 5 hours. The task is to automatically fly through a small maze from the take-off marker to the landing marker, sit down, and then return, flying over a ledge-obstacle along the way.
The most painful thing was to read the letters in the last week with the theme “Everything. I broke the robot. ” The most enjoyable thing is to see how the very first team showed such a level of preparation that we were waiting for.
')
And yes, below the photo report - carefully, traffic .

Flying in the rain

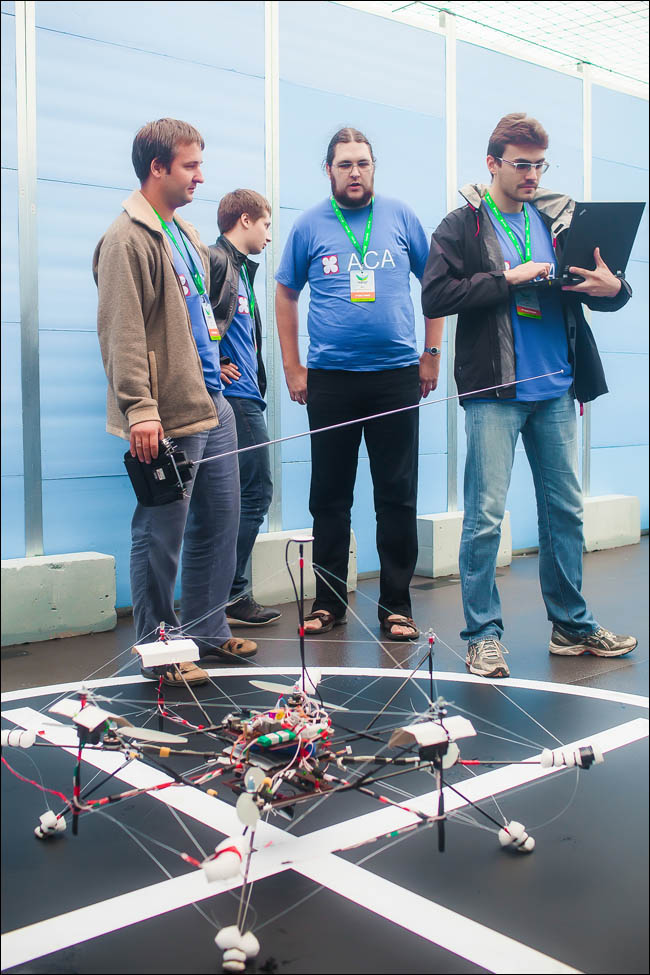
Open the first day. From left to right: Vitaly Polyansky from the jury (deputy for scientific work of the dean of the Robotic and Intellectual Systems faculty of the Moscow Aviation Institute), then me and Alexey Dobrovolsky (director of CROC software development).

Preconfiguration before flight

Installation on the start marker
If you missed previous episodes
Here we talked about the competition , and here - about how to assemble your robot and with what difficulty it once flew.
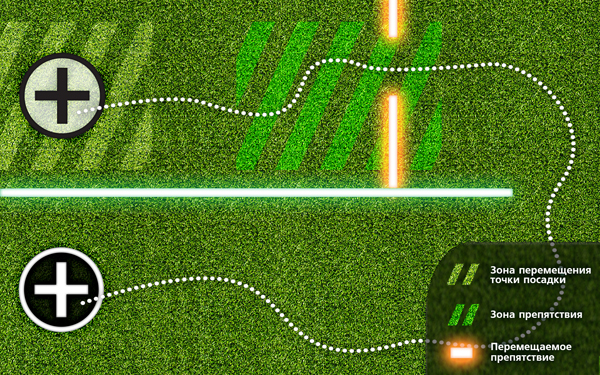
Polygon layout
Our team flew out of competition in the days of the final, with a robot that we did to build up experience in the direction of robotics outside of normal projects. My story will be exactly from the point of view of the participant. And, perhaps, I will pay the most attention to errors in flight: knowing such things is very useful.

The participant is preparing to start
The flights went on for two days, and the adrenaline was just a sea. Here are the participants who participated in these final flights and their results:


Exterior wall of the landfill

What did the labyrinth look like

Spectacles before the competition
Flying on cameras
So, the very first team of 2engineers showed just a wonderful flight at the very beginning. Half the way they went like clockwork and were just half a step away from the first flight of all to break and take the competition on the first attempt. They flew strictly on the camera. The algorithm was doped so that they entered a turn at the maximum speed along the ideal glide path, recognized the marker immediately, sat down well, but on return they crashed into the partition. They perfectly sharpened the algorithm for a specific polygon. What prevented - it is not clear. Maybe some kind of shadow is random, but right after the partition, their robot fell. It's a shame, but after the accident the robot did not even take off for the second attempt - something just fell down inside.
"Lost at the test site"
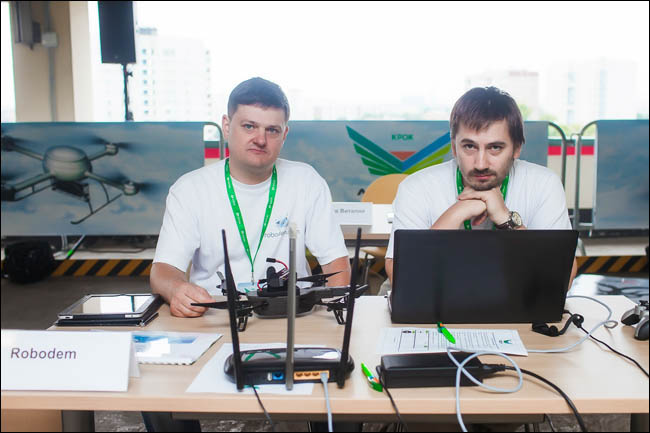
The robot of the “Robodem” team flew great, and also found great markers and sat down very precisely. They are the only ones who passed the fourth control point ahead of schedule, even on test flights. A few months before the finals, the robot walked smoothly along the figure of eight drawn on the floor. But at the final there was a slight problem with recognition, and therefore he would sit three times on the finish area, then turn around near the walls - and go back to this marker, then try again to fly away. After 6 minutes, he still saw the “light at the end of the tunnel”, found a turn, saw the starting marker and sat on it.
Wi-Fi problems
At about half of the participants, the robot did not count everything on board, but transmitted the image to the laptop via Wi-Fi. The problem was that none of the participants expected that the Wi-Fi network would be noisy with a large amount of natural traffic from the city networks around (no interference, we watched this). For example, all ArDrone copters sent a video stream to the “ground” and received commands from the “server” as if from a remote control (after all, a small robot, and the platform is closed, many things are not easy to install) - and it was here that the participants were waiting for lags. For example, the first Wi-Fi channel occupied 8-9 home and office networks.
More problems
- Railab (Polytechnic Museum) flew well, but could not return - it seems, the battery suddenly failed, not allowing the robot to fly a little.
- Avia Engineering showed an excellent technological base during test flights, but they were still let down by the engine group, and they could not take part in the final. But well done, came as spectators with their apparatus.
- “IKar” was moving around the landfill, but it was sharply let down by the recognition of landing sites. Perhaps due to the fact that his information on the results of recognition was transmitted over a radio link at a frequency of 915 MHz. Since we have radio-relay equipment of the base station on the roof, there could be interference on this channel. If I am not mistaken, another transmitter was at the debug of their robot, and the new one was not tested locally.
- Everyone who was guided by a magnetometer, that is, a compass, got problems due to the reinforced concrete structures of the building. Unfortunately, not everyone understood this long before the start of the competition. Robots ended up trying to fly straight into the nearest wall - the orientation failed. On the other hand, for example, the “Universal Mechanism” flew purely on gyros and very precisely.
- The team from Vladivostok could not lift the robot into the air at the first attempt and did not even try to do it a second time. I cannot name the reason, but apparently, they realized that fixing something quickly would not work.
- The ardron of the “Universal Mechanism” on the test flights showed almost perfect results, successfully completing five of the five test flights and being within two and a half minutes. But at the competition, the team in the first flight was let down by the humidity of the landfill, because of this, optical odometry failed, and in the second - the uncertain wi-fi connection between the drone and the ground station. Both of these problems did not show up on test flights.
- Possible glare on the pavement after the rain, it seems, upset those who flew with the optic flow, and not sonar - it's like an optical mouse to drive through the mirror.
Our flight
Perhaps, it is worth telling a little about our robot. Our team was out of competition, since our company organized it. We set for ourselves three important limitations (they are partly complications):
- The algorithm should not be sharpened for the range: you need to universally solve the class of problems, and not specifically this.
- No GPS: it is assumed that the robot in the future will be used where the signal may be distorted or absent.
- All calculations must be carried out on board the robot (work without communication with the ground station, with only a single signal from it - at the start).
This is us

This is our robot
We had 8 batteries (well, we could afford it), an expensive lidar and, just in case, the second such robot that was needed not to go the distance if we split our first one in the tests. On the last runs before the tournament, our drone flew through the labyrinth and back steadily over the time from 3.58 minutes to 4.2 minutes. We were just sure that everything will be fine with him, and he will go the distance.
To our great surprise, the first attempt failed completely - the robot simply did not fly anywhere.
As it was found out in the break between attempts, the reason is completely banal - we did not provide for duplication of the data transmission channel. All data processing is done on board, so the robot needs to transfer only the command to the start. Later we get telemetry from it. When we arrived at the first attempt, we considered ourselves absolutely ready. We had all the software running on the robot, the software was deployed on the laptop, the router was online, but for some reason the team was not transferred from the laptop to the robot. If we had a second laptop or remote control, we would urgently transfer the command from them.
On the second attempt after rebooting the laptop, the robot flew successfully.
We flew in 4 minutes and 1 second.
Here is the video of the first day of the flight -
2:09:45 - our successful attempt
I used to write how we wore out with the optic flow sensor, since our lidar did not reach the walls. On the pre-flight tests, it turned out that the lidar is enough for the entire length of the test site and the optic flow is simply not needed. A lidar makes a more accurate measurement, that's enough.
We also had a problem with the algorithm, it is very critical to different types of lighting. That is, if the bright sun shines, falls on the walls, then they turn out brighter than the target itself. To prevent the robot from crashing into the walls, we modified the algorithm so as to discard them not being taken into account during recognition. On tests, we tried to show the robot a lot of bright things with contrasting objects inside - he saw, for example, three goals, and he stopped in the air, waiting for two to disappear. As a result, we played optical input filters until we got more or less working parameters.
When we achieved that our robot could already perform the competitive task, we complicated the task: we installed additional partitions on the testing ground, and even experimented with flying around obstacles in the form of people. Moreover, we were so confident in our abilities that we turned our backs on the flying robot and waited until it flies over.
Here are videos about it. Additional partitions:
And we are in the form of additional obstacles:

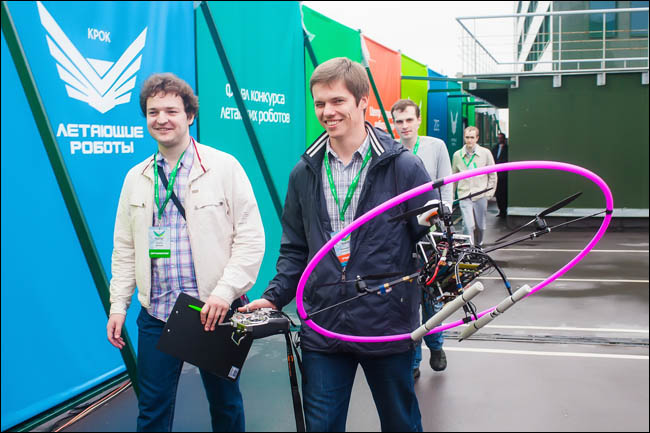
Just before the flight, we rejected such a frame: very heavy. But they invented a wonderful body kit from hula-hoop, which, by the way, saved us - a little touched the wall. Yes, this is the first time in all of our flights, when the drone touched something. Also a coincidence.

But we are happy, with our robot and spare frame.
General impressions
On the last tests before the tournament, I was very pleased that all the teams were configured quite complacently to each other, calmly sharing information. Someone advised, for example, to put the camera on the back of the copter, so as not to make an extra turn when searching for a marker. One of the teams managed to implement it before the final.
The second week of test flights was all crammed. Our training ground was officially open from 10:00 to 20:00, but almost every day the flights went until 10 in the evening, and at the training ground 5 teams at a time.


There were a lot of girls

Notice how positive all are.
Those who walked quite well can be equally divided into those who had ready-made ArDrone with calculators on the "ground" and powerful video stream processing algorithms, and half of custom solutions that were carried by various sensors.
In general, those teams that initially attended to computer simulation of the behavior of their robot flew the best. It was these teams that had the opportunity to debug the navigation and recognition algorithms without breaking robots and not arriving at the landfill. There were also those who used a simulator in their own hand for the simulation. This is the “2engineers” team - they just took and developed their own simulator - they are game developers, for them, it seems, it was not difficult. I remember that when they showed me this simulator, I initially even said: “No, why are you showing me the video from the camera? Show me the simulator. ” And they: “This is a simulator” From a distance it was indistinguishable from what the robot actually transmits from its camera. They just arrived, took our test site on camera and put all the textures on their model. And on this they already debugged their mad turn and recognition algorithm, and that's all.
Many were tempted to add code between attempts or change the parameters. We warned them and asked not to touch anything, to fly a second attempt on the same. The best is the enemy of the good, this is just the case, it is worth making corrections in one line of code and everything will break. After all, there will be no time to check and realize at all what you have done.

At the reception
The winning team before the flight, still serious and worried about how everything goes

The Avia Engineering team and their robot, which failed at the last moment

The weather in the final days let us down, warmed blankets and how could)

The robot of the ASA team we called ourselves the flying Dutchman

One of the Asovtsev sets the robot on the launch pad

And here 2engineers are preparing to press the "Start" button

This is an individual participant, Vitaly Agalakov. Unfortunately, coping with the task alone was not easy.

Apparently, according to the members of the team "Railab", a robot with eyes flies better. Almost helped :)

Fans warm blankets during a rain break

The captain of the team Soyuz, for the best video presentation on the basis of the third control point, they received a laptop from us. Chosen by the audience.

Hummingbird Team Robot

And the participants themselves with a robot at the press wall with a lot of logos of information partners of the competition
Operation to protect yourself from the rain
Member from iKar sets his “Dutchman”

Photo on the memory of the team "AA robots" with a drone and on the ground

So the guest who didn’t fly from Vladivostok

The team of 607 came to us straight from the Rostov-on-Don solar at that time.

Team 3 guys 1 bot, the last shamanism before the decisive attempt
results
Here is more detailed about those who reached the final. Of these, 10 representatives of Moscow and the Region, and one each from the Northern Capital, Bryansk, Krasnoyarsk, Tomsk, Kazan, Rostov-on-Don, Biysk and Vladivostok.
And this is the comment of the jury of the first day of the final of the competition, Vitaly Polyansky, deputy research assistant of the dean of the Robotic and Intellectual Systems faculty of the Moscow Aviation Institute (MAI):
“I have been working in the field of unmanned systems for many years and even have been organizing circles on robotics in secondary schools and MAI. But the last final of the competition, to judge which I happened to, really surprised and pleased. For the year, participants were able, by combining the development of robots with their main activity in educational institutions and core work, to make completely autonomous drones, traditionally controlled by means of the console, with the help of remote controls. And some even built robots from scratch, creating unique designs. And this is all solely on enthusiasm! Their eyes are burning, which means that the competition was not in vain. ”
The prize-winning million was taken by the team “Robodem” from Sergiev Posad . The winner’s drone completed the contest task in 6 minutes and 45 seconds.
At the same video of the first day of the flight from 32:20 you can see their victorious flight:
Here you can watch the video of the second day of the flight.
These videos could be watched online, both days were broadcast during which almost two thousand people watched the contest. For example, the statistics of the first day:


Winners after the flight
Source: https://habr.com/ru/post/192704/
All Articles