Explorer-2

A day after the publication of the article Explorer-1 (My "Spirit"), I began to develop the next version of the device. On the advice of habrayuzer, outlined what needs to be added in Explorer-2:
1. Two-way communication.
2. Camera
3. Duplicate sensors.
4. More sensors.
5. Sane case.
6. Sleep mode.
7. The power source is more serious than a seedy “crown”.
')
I expected to do all this in a couple of weeks. However, as a result, development from scratch took a whole month. Too many pitfalls were detected at each step.
First of all, the necessary sensors and components were purchased: Analog thermal sensor LM335Z, digital temperature sensor DS18B20, digital temperature and humidity sensor DHT11, photoresistor VT93N1, atmospheric pressure sensor BMP085 from Bosch, camera drive - MG-90S.
1. Two-way communication .
This is the main point that distinguishes the 1st version from the 2nd. Without two-way communication, it is impossible to control the device by definition, and it is risky to completely rely on automation.
First of all, I made the connection between the two Arduins

In theory, it is easy. But in practice, it turned out that arduin does not have multitasking. That is, it cannot simultaneously receive and send data, it is necessary to conduct each process separately. The way out was a time out. The device waits 7 minutes for the command to arrive and, if it has not arrived, sends its data (this delay between “Mars” and “Earth” came in handy).
The device sends data in the following form:
1st line: / temperature from analog temperature sensor / humidity / temperature from digital thermometer
2nd line: / temperature with DHT11 / pressure / voltage supplied to MC (microcontroller)
It can accept commands in the form of bytes in ASCII, which we enter into the terminal as letters (for example, the English "P" is taken as 80). The list of teams was formed in the course of development:
P - rotate the panoramic camera.
D is the temperature read from the sensor inside the MC.
R - software reboot.
1 - open the protective cover (not used)
2 - close the protective cover (not used)
2. Camera
With the main problem figured out. Now the question has become, which camera to use? A phone connected to a PC via Bluetooth / WiFi will discharge very quickly. Therefore, I decided to use Presrigio's USB webcam.

Yes, it is wired. However, telemetry was transmitted all the same by radio, so I don’t consider this to be a “scam”. Video captured through Debut Video Capture.
The camera was seated on a servo and could rotate 180 degrees to shoot panoramas.

3-4 - Sensors
Compared with the previous mission, this device had a much larger number of sensors. However, in the end, the law “from the idea to the implementation of the functional is reduced” made its contribution - I considered the tilt sensor, gas and heat unnecessary. The temperature sensor was duplicated three times.
5. Housing
A cardboard box is in some sense convenient, but not serious. I am not particularly friendly with metal, but it’s more usual to work with wood. Having decided on the size, I saw out of a piece of plywood just such a box


In it I made the holes for the camera drive and sensors.
6. Sleep mode
To save energy, sleep mode was introduced. It was implemented as follows: when a little light fell on the photoresistor, the device stopped the program operation (an empty cycle was scrolling). When there was enough light, the apparatus functioned.
The photo itself is a photoresistor

7. Power
The device was powered by six Duracell Power Check finger batteries, giving a total of 9V.
I packed this whole thing, tested it, and in the end it turned out like this:



Launch
Before the launch itself, the connection suddenly stopped working. Diagnostics showed that problems lie in the digital thermometer. There was neither the time nor the strength to dig into it, so I just cut it out as appendicitis. Also, I considered the protective cover that covered the sensors as an unnecessary element, so I also removed it.
Warranty machine - 2 days (for the previous mission). The work was scheduled for 5 days. The goal is to create weather charts for Mars and take pictures of the surface.
As soon as everything was settled, Explorer-2 hit the road - on the windowsill.
Flight Chronology
Day 1 (04/17)
Explorer-2 landed successfully. First of all, the following data was obtained - an ambient temperature of 15 ° C, a temperature inside the housing of 20 ° C, a humidity of 39% and an atmospheric pressure of 101619 Pa. Also, the first shot was taken from the surface of "Mars":

A few minutes later, the first panorama was filmed (for a higher resolution panorama, see here ):

The panorama was made on the basis of the video captured from the camera at the time of movement.
Communication with the device was not always maintained. I read the data in "sessions."
Somewhere at 20:40 an alert came to the terminal that Explorer had entered sleep mode:

So ended the first working day. There were no problems, just amazing.
Day 2 (04/18)
The panorama of the last day was filmed in the evening, now I wanted to do the morning one. After reading the telemetry, I gave the command to shoot a panorama.
( Watch in higher resolution )

In general, everything worked so smoothly that it was even a bit boring. Just come and get the data. I wanted some interesting situations. And they were not long in coming.
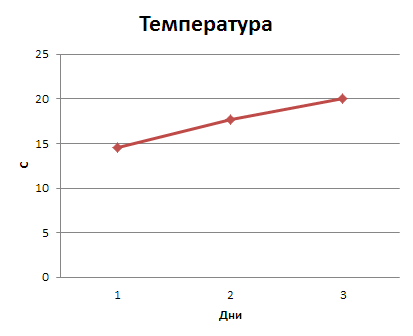
All day I recorded the testimony. At the end of the day, after the device went into sleep mode, it averaged and entered into the table:

The day passed without a glitch. In theory, the next device’s warranty will expire (Explorer-1 died after 2 days). Will the second version? In any case, the charge of the battery did not decrease much during the day and there was no cause for concern.
Day 3 (19.04)
Began to read the telemetry in the morning. A surprise was waiting for me - the voltage on the controller dropped to 0.5V. The analog sensor also began to increase the temperature, which indicates the discharge (incomplete) of the battery. Sensors gave false testimony. To normalize them, I rebooted the device. A few minutes later everything returned to normal. It became clear - it is necessary to save energy. Therefore, I did not shoot a panorama and did not send any commands to the device. Only read the testimony.
A couple of hours later, the nov connected to the device. telemetry crawled, but then bam ... and broke off. Attempts to establish communication failed. The device transmitted death lines:
/ 89/49
/ 22/101790/4417
Last shot:

And shut up. Forever and ever.
An autopsy revealed that the batteries were dead.
Explorer-2 after completing the mission

It was on the one hand offensive, but on the other joyful. It's a shame because there were plans for 5 days. I wanted to get more accurate data, fit in to the panoramas.
The joy was that he worked more than a guarantee (3.5 days). He worked much more stable than his predecessor. I managed to do what I wanted. All assigned tasks were completed.
The results of the work of Explorer - 2 were obtained the following graphics:


What next?
I have two ways:
1. Explorer Development - 3
2. The construction of the simulator cabin spacecraft
The first way
The shape of Explorer -3 I already loom. This time, the device will be equipped with a drill for drilling the soil (the device will be on the ground) and a spectrometer to analyze the chemical composition of the atmosphere and the samples delivered through the drill. In fact, the spectrometer is not such a complicated thing. I have already acquired the diffraction grating, and then it’s up to the small thing - you need to make a chamber of a uniform material and equip it, for example, with a lighter, in order to burn samples and analyze the spectrum.
But, I prefer my second way.
Second path
Many people know that astronauts are trained on a special simulator, a copy of this device, before flying. That is, real flight is simulated. The optimal solution, I chose the cockpit of the American apparatus "Mercury". It is single and uncomplicated in its design, as well as the set of functions and the device of the control panel are known. I do not know what will happen in the end, but it should be at least a simulator of orbital flight. Engine shakes, control panels, MCC, etc. will be played. I am already studying the details of the flights of the "Unions" in order to try to repeat the process as much as possible. The cabin itself will be a symbiosis - something I will take from "Mercury", something from the "Union". If everything goes smoothly, the docking with the ISS will be added, good, at least it's difficult to accomplish, but really (in general, I will not fly to a real space, so I will fly to my own).


I start building a cabin from June. I hope that all your plans will work out.
Source: https://habr.com/ru/post/177435/
All Articles