Lun hovercraft
Good day!
On Habré, there was already an article about SVP, we read it and, under the impression, decided to build our robot. But in this article we will talk not only about creating an airbag, but also giving it useful functions.
')
Under the cut a lot of pictures.
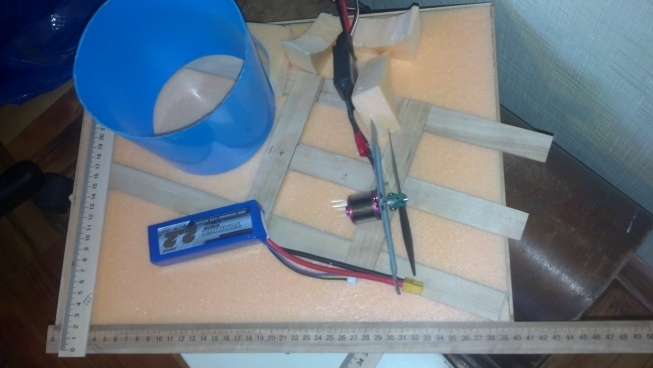
After the approval of the first version of the design, the most interesting began - the creation of a working sample from the materials at hand. The ship decided to do the size of a little more than a laptop. Styrofoam sheet, baby bucket and rulers were purchased in the nearest market, and electronics ordered with hobbyking.
Shopping list:
- GWS EP Propeller (DD-5030 127x76mm) - screw;
- P2632 Brushless Outrunner 3800kv - lifting motor;
- Birdie 50A Brushless ESC w / 3A BEC - speed control;
- Turnigy 2200mAh 3S 20C Lipo Pack - power supply;
- Turnigy balancer & Charger 2S-3S - charging for the battery;
- Hobbyking 60w Power Supply - power supply for charging;
- HK15168 Coreless Analog Micro Servo 8g / 1.2kg / 0.12s - servo;
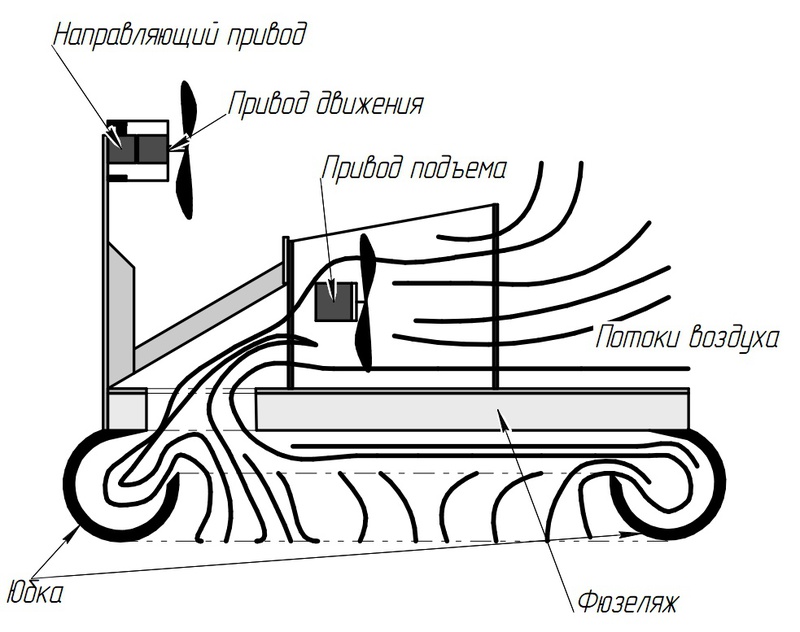
The first assembled design turned out to be working though, but it had a number of drawbacks:
- poor balancing;
- strong noise from a lifting engine;
- lack of space for the installation of peripherals.
In addition to this, we expected that the power take-off would be enough for both the movement and the lifting of the vessel. But our hopes were not justified, we had to buy another engine and close the PTO opening.
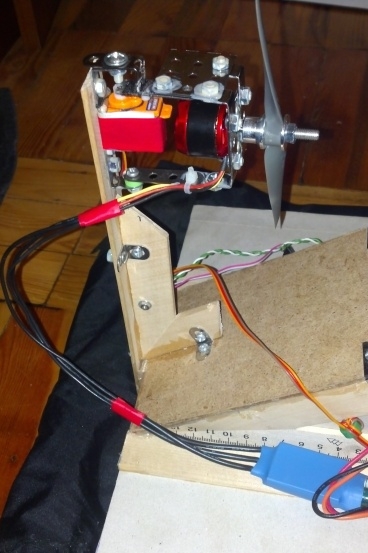
As a result of the modification, a mast with a servo drive was added to the body:
And the video of the first test:
The first tests showed unsuccessful pillow designs. Since it was made from what was, and we had an old umbrella, this pillow had the ability to bend under the vessel. Management was organized through stm32vldiscovery and remote from a radio-controlled machine. The same test revealed that the distance of the remote is very low and we decided to install a bluetooth module.
Photo skirt separately from the body:

The result of the next modifications:

A quick-written program (five buttons and nothing superfluous) solved some problems. But still, the state of the vessel at that time did not agree with our ideas and ideas, and we decided on a more serious modification.
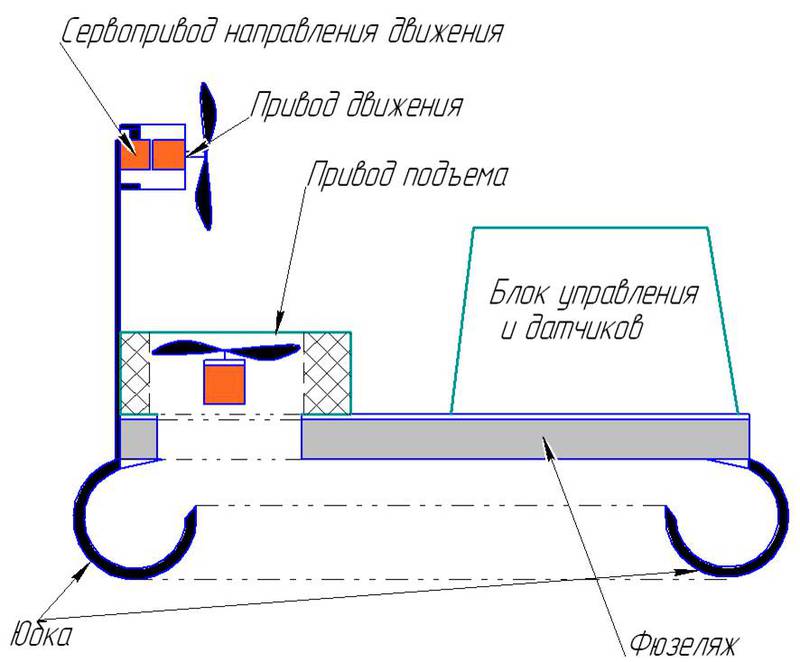
In addition to changing the layout, the control scheme has undergone changes. STM32VLDiscovery has been replaced by STM32F3Discovery. The reason was the presence of an accelerometer, gyroscope and magnetometer at stmf3.
Here is such a sandwich turned out:

The sensors were also purchased:
- ultrasonic distance sensor HC-SR04;
- humidity and temperature sensor DHT11;
- IR presence sensor HC-SR501;
- gas sensor MQ-2.
And to power the sensors DC-DC converter on the LM2596 chip. An automatic power-off system based on the thyristor and the opening relay was also implemented.
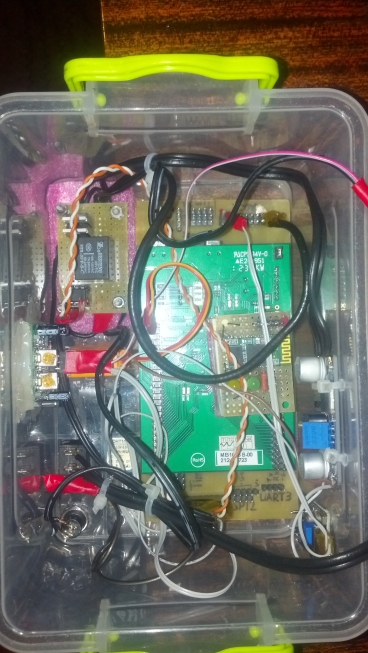
The interior of the robot at the moment:
Ultrasonic sensor and alarm:
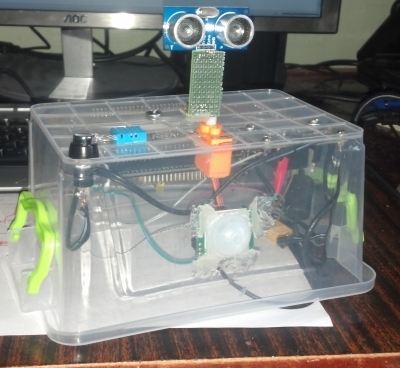
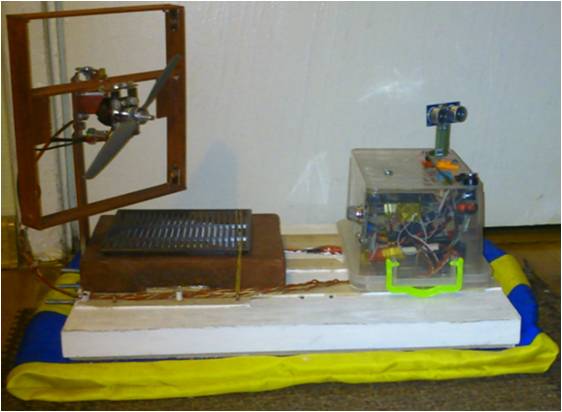
General form:
A new program for android was also written, where the button control was abandoned:
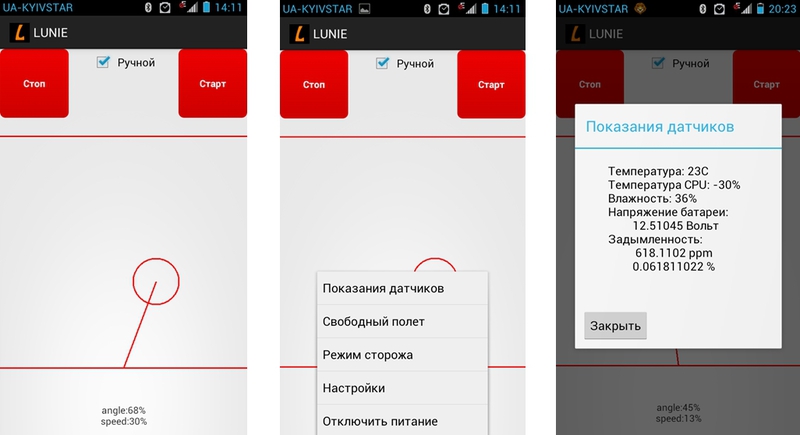
The red circle is the place of touch. By moving your finger up and down, the speed is regulated, and the direction of the traction motor is adjusted to the left and right.
Demonstration of results:
- “Watchman Mode” - the robot waits until a person appears in view, and then sends a signal to the control panel;
- “Step-by-step mode” - the robot scans the space in front of it with an ultrasonic sensor, after which it selects a route and begins to move along it;
- “Manual control” - the robot is controlled completely from the console, does not make any movement adjustments;
- “Semi-automatic mode” - the robot is controlled from the console but adjusts the flight in motion.
To create this SVP was first of all interesting but to use it as a robot (and that was our goal) is a dubious pleasure. For the apartment, this robot is too noisy, and he will not be able to drive around the garden. However, the control system assembled in this project will work even better on a wheeled or tracked robot, and if you add a couple more engines, you can also make a quadcopter.
UPD: SVP Part 2
On Habré, there was already an article about SVP, we read it and, under the impression, decided to build our robot. But in this article we will talk not only about creating an airbag, but also giving it useful functions.
')
Under the cut a lot of pictures.
After the approval of the first version of the design, the most interesting began - the creation of a working sample from the materials at hand. The ship decided to do the size of a little more than a laptop. Styrofoam sheet, baby bucket and rulers were purchased in the nearest market, and electronics ordered with hobbyking.
Shopping list:
- GWS EP Propeller (DD-5030 127x76mm) - screw;
- P2632 Brushless Outrunner 3800kv - lifting motor;
- Birdie 50A Brushless ESC w / 3A BEC - speed control;
- Turnigy 2200mAh 3S 20C Lipo Pack - power supply;
- Turnigy balancer & Charger 2S-3S - charging for the battery;
- Hobbyking 60w Power Supply - power supply for charging;
- HK15168 Coreless Analog Micro Servo 8g / 1.2kg / 0.12s - servo;
The first assembled design turned out to be working though, but it had a number of drawbacks:
- poor balancing;
- strong noise from a lifting engine;
- lack of space for the installation of peripherals.
In addition to this, we expected that the power take-off would be enough for both the movement and the lifting of the vessel. But our hopes were not justified, we had to buy another engine and close the PTO opening.
As a result of the modification, a mast with a servo drive was added to the body:
And the video of the first test:
The first tests showed unsuccessful pillow designs. Since it was made from what was, and we had an old umbrella, this pillow had the ability to bend under the vessel. Management was organized through stm32vldiscovery and remote from a radio-controlled machine. The same test revealed that the distance of the remote is very low and we decided to install a bluetooth module.
Photo skirt separately from the body:
The result of the next modifications:
A quick-written program (five buttons and nothing superfluous) solved some problems. But still, the state of the vessel at that time did not agree with our ideas and ideas, and we decided on a more serious modification.
Lun 2.0
In addition to changing the layout, the control scheme has undergone changes. STM32VLDiscovery has been replaced by STM32F3Discovery. The reason was the presence of an accelerometer, gyroscope and magnetometer at stmf3.
Here is such a sandwich turned out:
The sensors were also purchased:
- ultrasonic distance sensor HC-SR04;
- humidity and temperature sensor DHT11;
- IR presence sensor HC-SR501;
- gas sensor MQ-2.
And to power the sensors DC-DC converter on the LM2596 chip. An automatic power-off system based on the thyristor and the opening relay was also implemented.
The interior of the robot at the moment:
Ultrasonic sensor and alarm:
General form:
A new program for android was also written, where the button control was abandoned:
The red circle is the place of touch. By moving your finger up and down, the speed is regulated, and the direction of the traction motor is adjusted to the left and right.
Demonstration of results:
About operation modes:
- “Watchman Mode” - the robot waits until a person appears in view, and then sends a signal to the control panel;
- “Step-by-step mode” - the robot scans the space in front of it with an ultrasonic sensor, after which it selects a route and begins to move along it;
- “Manual control” - the robot is controlled completely from the console, does not make any movement adjustments;
- “Semi-automatic mode” - the robot is controlled from the console but adjusts the flight in motion.
Afterword
To create this SVP was first of all interesting but to use it as a robot (and that was our goal) is a dubious pleasure. For the apartment, this robot is too noisy, and he will not be able to drive around the garden. However, the control system assembled in this project will work even better on a wheeled or tracked robot, and if you add a couple more engines, you can also make a quadcopter.
UPD: SVP Part 2
Source: https://habr.com/ru/post/175017/
All Articles