XAircraft x650 and aerial photography

Once, a friend of mine called me a photographer and asked a very interesting question: “What if you hang some photo soap box on a radio-controlled helicopter and try to somehow shoot this soap dish from the air?”
And I remember, from early childhood I dreamed of radio-controlled aircraft, but I lived in the so-called "outback", so I did not move further than the children's drawings in this matter then. This time, I could not answer anything on the move, but since I was suddenly interested in the topic (and who would not be interested in?), I promised to sort out the question and call up later.
')
From the very beginning of the research question, I switched from ordinary helicopters to quadrocopters, or rather AR.Drone, since they are much easier to manage. But it turned out that specifically AR.Drone could lift something very light, and, accordingly, not very high quality. We even thought then about android phones, for which we could write a program and control it from another phone via wi-fi.
Further searches brought me into the wilds of DIY-copters, which turned out to be at least an order of magnitude cheaper than AR.Drone with similar characteristics, and with a small overpayment they allowed me to pick up much more interesting things, like mirrorless mirrors, for example.
In the end, after a couple of months of studying all this, we decided to order the XAircraft x650v8. By the way, it is strange that then we lost sight of the DJI F550 + NAZA, which is a bit cheaper, and the feedback is much more stable.
But be that as it may, with x650 we spent almost a year, gained experience, knobs, spattered a lot of details and, I think, I could tell quite a lot about him.
Looking ahead, I will immediately warn you: if you are going to take off from the air, or even manage more or less heavy copters with a load, just think about FPV and telemetry in full. Save a lot of money, because understanding the details of what is happening in the air at this particular moment gives +100500 to controllability and, accordingly, will make it more likely to save a kopter that has gone mad, without breaking any parts or frightening the grandmothers with a UFO falling from the sky.
So, XAircraft X650v8:
- 8 engines on 4 axles
- Net weight: 1260g
- Maximum load: 940g (we lifted more, somewhere 1200-1500g)
- Flight time on 25C 3300mAh - about 10 minutes with Canon 1100d + Canon 35mm F2
- Price: ~ $ 750
The standard set does not include: control panel and receiver for it, batteries and charger, camera mount, optional compass and gps receiver.
When you have the package, you will see a bunch of black fashionable boxes, and a million bags with details inside. Everything is very carefully packed. All bags are signed. There is a small stock bolt.

There are two tips here.
1. All bolts should be replaced by ordinary cross. Included are the hex and I could not find a single key that would not be erased / broken after a month of use. Anyway, they are uncomfortable. You need 2.5mm and 3mm bolts. Pieces of 50 to stock. Fortunately, they cost a penny. But the hex keys on 1.5mm and 2mm will still be useful, because there are very special bolts that you can hardly find in stores, I advise them (keys) to buy at least a couple of pieces right away.
2. You can replace 4 carbon tubes with an outer diameter of 10mm. Those that are on their feet - first of all, because This stupid carbon fray, crumbles and breaks just to cheer and still leaves the most unpleasant splinters for any reason. In any plumbing or fitting shop you can find aluminum tubes with the same diameter. 2 meters of such a tube cost about 30 rubles. Saw off pieces of the desired length, and your copter gets +1000 to the impact resistance, especially in the area of the legs on which it lands. The weight of aluminum tubes is not at all much more carbonic.
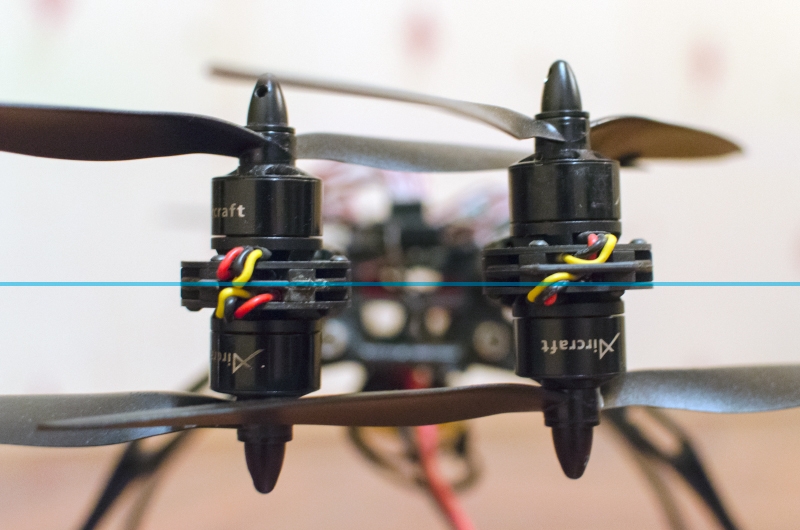
By the way, we also attached foam ends to the ends of the legs (in the photo below they are wrapped with black electrical tape for beauty) and thus we got a much softer fit on hard surfaces without any extra jumps:

I would also replace the axles on which the engines hang (there are 16mm on the outside and 14mm on the inside), but I could not find such aluminum tubes. But on ebay you can find such carbon tubes at the request of “carbon tube 14 16”, they are much cheaper than “official” parts, unless they have to be drunk and drilled.
In general, after becoming acquainted with this copter, my insane disgust with carbon grew in me.
So, the first impression, with the exception of the omnipresent hexagons, was very positive. But then China began to show its true face.
The axes on which the engines are held, for unknown reasons, could not be installed strictly in one plane:
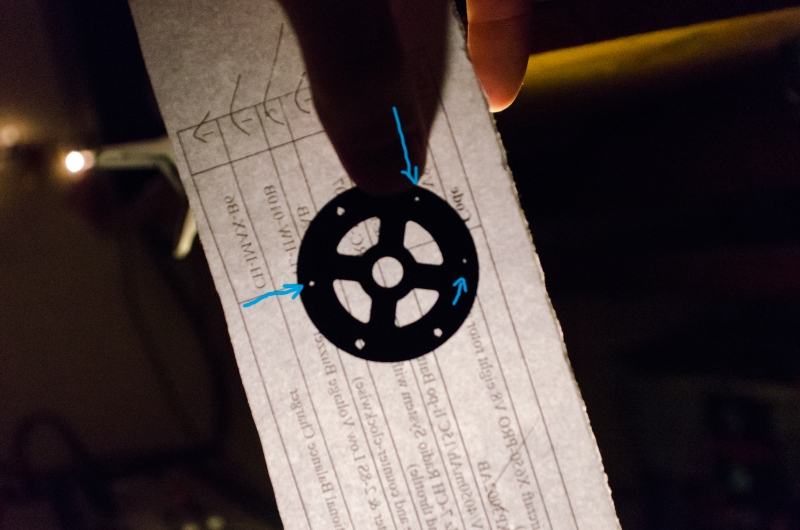
There were parts with holes that were not drilled:
So it was not possible to install the protective covers on the holders of the engine regulators (ESC) - all the latches were successfully broken, after which we decided to just wrap them with black electrical tape:

The official site did not work (earned in mid-summer), but, funny, the update worked in the program itself. Well, everything like that.
Assembly process:

Also, he has very fragile legs. While we were learning to take off and land, we broke a couple. Those who came for the replacement immediately reinforced these places with tin stripes:
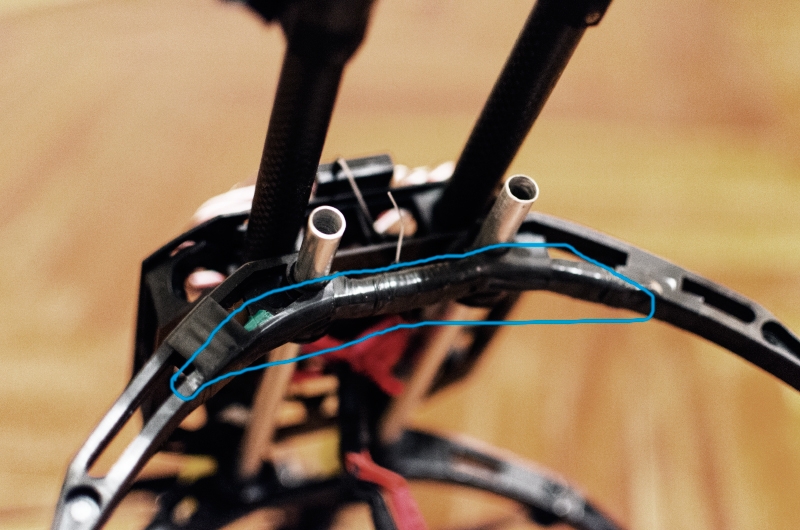
Since then, they have not changed.
Fortunately, all this was not so critical to break our enthusiasm, and for a couple of evenings the helicopter was assembled. But here we again began to stumble upon strangeness.
The most important oddity, which I could not explain - with the retention of the horizontal position. The situation is as follows:
- Copter gyros are calibrated with a spirit level.
- The joysticks of the console are calibrated.
- Tips found in various forums about balancing screws with pieces of electrical tape were tested.
- Tips on putting all sorts of things under the brains of a copter to change its horizon “hardware” were tested.
Despite all this, in the remote it is necessary to adjust the so-called. trimming approximately 2-3% forward, 20% tilting to the right and sometimes (!) up to 30% turning left, i.e. we kind of force the remote to always send the state of the joysticks a little non-zero. Otherwise, the copter will not stand on the spot at all. And then it will turn over when taking off. And just like I didn’t try, forcing at least a couple of seconds to just hang in the air (without wind), without touching the joysticks - I couldn’t. I admit that I did something wrong.
And yet, sometimes I noticed a strange glitch behind him: after a long idle time, when I tried to take off right after switching on, the kopter tried to turn over on its side even without looking at the trimming in the console described above. It only helped to “turn it off and on again”.
In general, somehow, but by spring we began to fly little by little. While we were driving additional parts to control the cameras, we clung to him all sorts of soap dishes and mirrorless cameras, set a timeout of 20 seconds on them, quickly took off, waited, lowered and ... saw that something was not right again.
Then we finally went broke on the Canon 1100d and the old Vivitar 19mm F3.8 FD wide-angle fix, which at first turned out to be quite good. But then either the vibrations or something else had an effect on him, but the picture became completely soapy for him and we switched to the Canon 35mm F2, which he had left.
At about this time, servo drives arrived to us and we used one tape to tape one of them directly to the camera above the shutter button:

It was especially fun to do it, because at that moment we were in a crowded morning train to Vyborg. But the design turned out to be surprisingly reliable, and we did not part with it immediately.
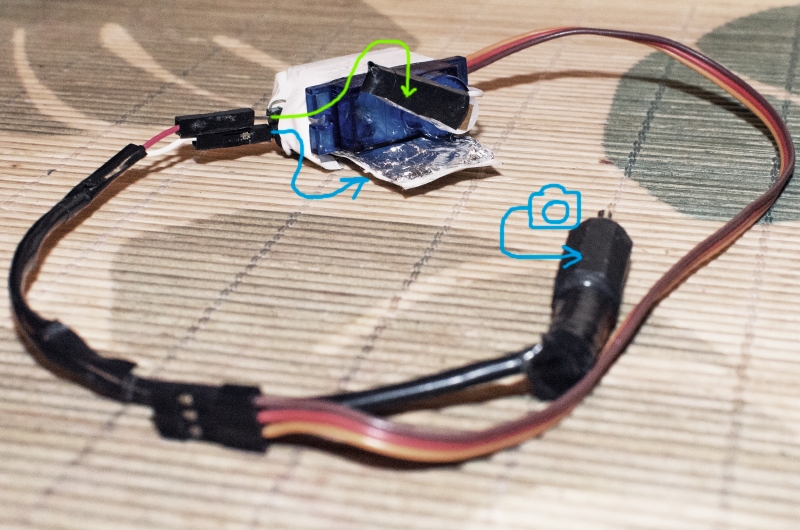
A little later, such a thing came to us:
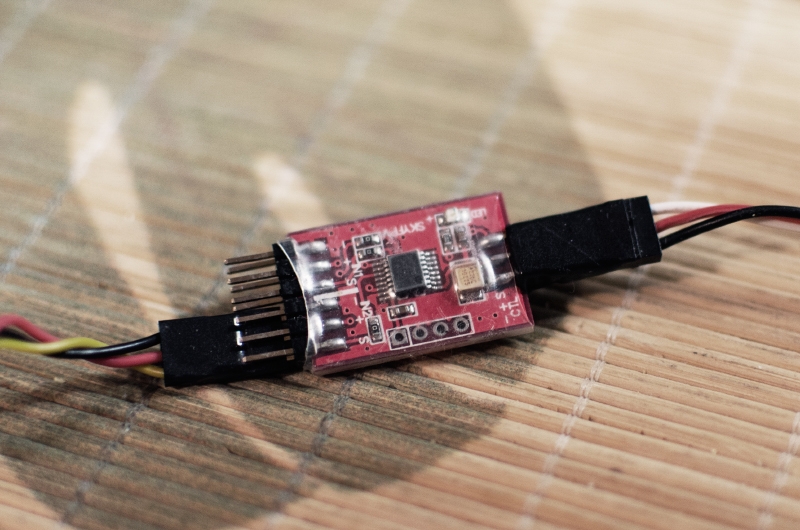
This relay is designed to switch the signal from one input to two outputs. In general, his passport destination is to change the cameras in the FPV system, but first we used it to close the shutter contact at the camera. Later, when it was decided that without FPV, everything was not at all cool, it was fulfilling its intended purpose with us, allowing us to choose a signal from two different cameras, and the first servo drive in such a simple design with the use of foil began to play the role of closure:
Here it is worth moving a little away from the topic, and tell you how our “engineering” thought went in terms of camera control.
Initially, for some reason, FPV seemed too complicated and unnecessarily expensive (although as it turned out later (and not once): the miser pays twice).
So, Google told us then a couple of interesting solutions for photographers.
One of them was Pixel Expert . The main delight for us from those promised by the perpetrator was the ability to view the image directly from the camera's matrix in the live-view mode. Those. we would see exactly what we were going to take off. Passport 200 meters according to the plan, we would be enough for the eyes and in general everything would be fine if ...
As it turned out after the tests, the distance of confident reception did not exceed a couple of tens of meters, or even less. In addition, 1100d, despite the statements of the manufacturer, was incompatible in terms of live-view. Communication with technical support was very funny and insanely absurd. Fortunately, on the Pixel transmitter was a built-in camera, which we used for the first time. But again, at very short distances. For insurance on the camera all the time hung servo, which I could press the shutter button, in moments when Pixel lost touch.
This is how our pixer with Pixel looked on board:

Deciding that it was somehow completely sad, we still ordered almost a complete set for FPV and another remote control with a receiver.
This kit included:
- 2 cameras (died by themselves in a couple of months)
- Receiver and transmitter at 200mw / 5.8GHz (up to a hundred meters work confidently)
- A pair of large antennas for the receiver and transmitter (turned out to be worse than the stock)
An additional control panel with a receiver was needed so that the photographer could control the camera himself. In the future, besides the shutter button and the FPV-camera switch, there was a control of the tilting camera mount, but before the onset of the cold weather we didn’t have time to do it, and buying it ready is very expensive, sometimes half the copter. It is not clear why.
We did not order the screen and glasses, because we decided to use a laptop with a usb video capture device and an existing Pixel, which had an analog video input on the transmitter.
In this case, with Pixel, it looked like this:

But even here this Pixel constantly let us down. The fact is that the console also works in the 2.4GHz band and somehow it turned out that their frequencies coincided too much - next to the console, the Pixel receiver picked up the signal of its transmitter, at best, two meters away from it. But in general, it was possible to shoot.
But everything except the copter:

On the left in the photo and on the right on the handle of the camera the cameras are sealed with tape.
About the process.
As we imagined it:
- Come to the place
- Choosing beautiful shooting points
- Connect, take off, look in Pixel at what the camera sees
- As soon as we see the frame - we freeze in place, take pictures
- Get down, check pictures
- If there are batteries left, GOTO 2
How it looked in reality:
- Have come
- Found a place where the sky is not completely hung with wires
- Decomposed
- Found that the Pixel receiver does not see the transmitter
- Found the position in which the pixel works
- Set up the camera (we shot in manual mode)
- We flew 10 meters, Pixel began to fail again
- I keep the copter in place, comrade shamanite with Pixel
- The pixel is defeated, the comrade tells where to turn and how much more to rise
- Follow the instructions
- Comrade says: turn a little to the right and stand still, now I will shoot
- I turn slightly to the right, I try to keep the direction (it’s not clear with height, I just don’t touch the joystick)
- Copter does not care, it then carries him further to the right, then he turns left
- I inform my friend that in terms of retention, I do everything I can
- He tries to catch the moment and take off
- We hang out in the air for about five minutes, trying to cope either with the wind or with the copter
- Get down
- We look at the pictures, on the half the horizon is almost vertical.
- GOTO 7
- For the second time, photos seem to be better
- re going
- If there are batteries left, GOTO 2
It is worth noting here that in terms of the brains we had a minimal configuration, i.e. without a compass and GPS, which at the time of the order were sold only together and cost about $ 300.
The compass promised us, in addition to improved stabilization, features such as Head Lock and Care Free. The first is to keep the direction, the second is the ability to turn the copter around its axis without changing the direction of movement. It would seem that two super-necessary and useful features in our case.
By the summer, a new version of the compass appeared in online stores, and apart from GPS. I did not regret the money and ordered with the fastest delivery.
But ... the very first flight with Care Free led to a crazy copter who refused to respond to any signals from the console. It ended, of course, an epic accident with the victims in the face of a single motor, 3 propellers, an ESC holder and more on trivia. It could have been better, but the test flight was at the stadium and the full-speed copter flew into the gate reel, caught on it, and climbed inside, entangled in the net. The bill, by the way, has long been not in our favor. Partly, therefore, by that time we already had time to stock up on spare parts and the repair was not a problem. But the sediment remained.
Head Lock also did not cause confidence and the direction kept even worse than the thruster constantly myself. I would even say that in general he did not hold him.
In general, the stability of flights, if it has grown, is not noticeable.
After that, it was decided not to order a module with GPS.
By the way, with a large camera on board, the copter behaved much more stable, although it was clear that it was working at the limit of its possibilities. In particular, the wind did not blow it so badly anymore. You can not say about flights, for example, with GoPro.
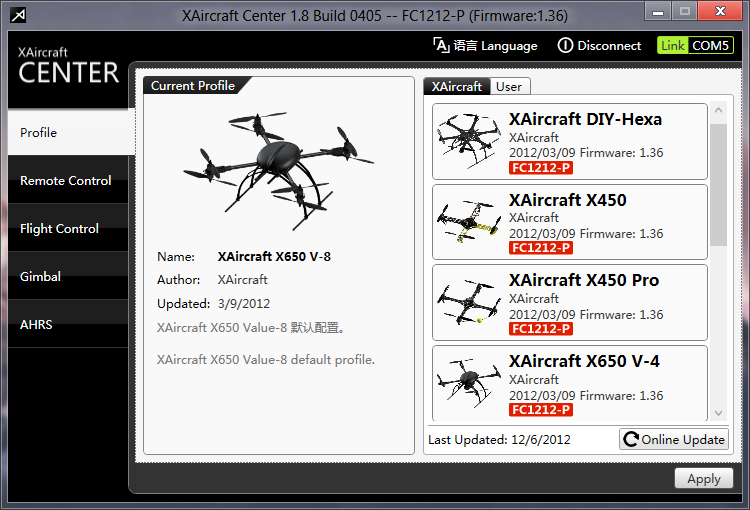
A couple of words about the software, which looks surprisingly nice.
Once connected, we can load one of the many models that are updated over the network into the brains of the copter. There is still an opportunity to create your own, but this is absolutely hardcore.
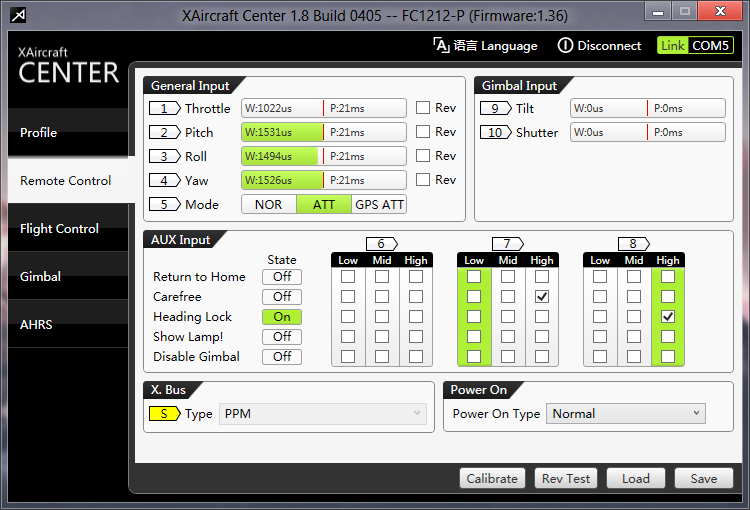
Further, the panel for calibrating the joysticks of the console (their state in the General Input frame) and the settings of some switches of all sorts of different features (Gimbral and AUX Input):
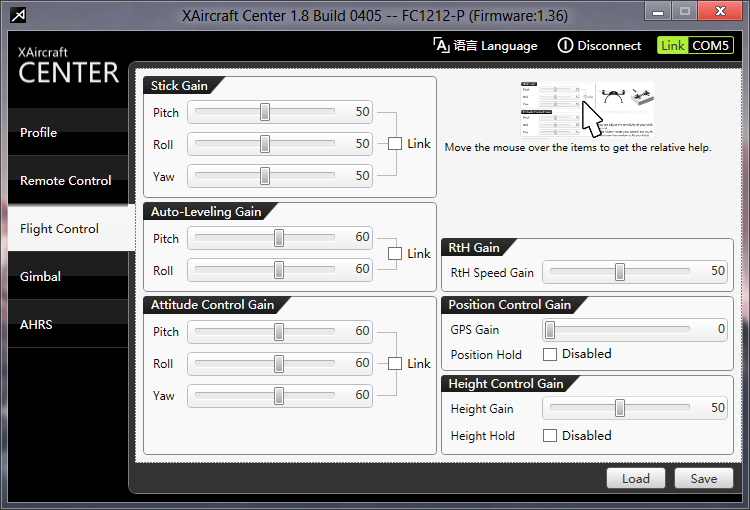
On the next tab, we can tune the behavior of the copter:
On the Gimbral tab - camera suspension settings.
And on the last - calibration and testing of gyroscopes, accelerometers and a compass (on the graph you can see how I shook the copter):
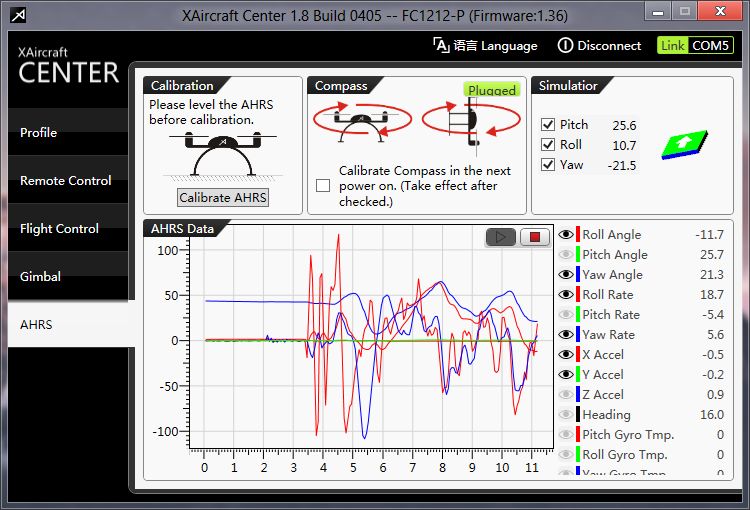
The software, probably, was the most pleasant part of this copter, with one small nuance. If you unhook the usb-wire without pressing the Disconnect button, the program hangs tight - only a reboot helps.
Already in the summer, in the midst of flights, we repeatedly thought about changing the platform to the DJI F550 with NAZA. Especially after this video (attention at 2:00!).
But it was getting colder, and after another epic accident in one very stupid day, we were completely demotivated and decided to postpone everything until next year, save up for a more powerful model of the copter, a full set of FPV in two echoes and all that.
Now we are thinking between two options that are equal in price: DJI S800 + DJI WKM and MK Hexa XL + MK NaviCtrl + MK GPS.
Internets tend to assume that the German MK is much more stable and wind resistant, but the S800 beckons with its folding design, theoretically more stable out-of-the-box carbon propellers, and a very open approach, which manifests itself, for example .
As for the x650, then I probably could surely advise it except FPV shnik. A powerful kopter - you can hang a lot of junk on it, not very expensive for its capabilities, well, a killer feature - it folds up and becomes very compact when you need to carry it somewhere. For aerial photography, IMHO, it is not very stable. Even the videos from XAircraft themselves (where the x650 stabilizes with GPS) in my opinion look a little less interesting than the videos of the same DJI.
I almost forgot, I am not a “pilot” with experience, so I can be mistaken about something. Here we describe our experience, the size of a year, which accounted for about 50 sorties with flights in completely different conditions.
I will be glad to clarify, advice and generally constructive discussion.
And yes, I could write a lot more, but I can’t add up a question from this, but I’m happy to answer anything I can in the comments.
Related resources
Manufacturers:
XAircraft: www.xaircraft.com
DJI: dji-innovation.com
MK: mikrokopter.de
Miscellanea:
multicopterwiki.ru
igorkandaurov.ru/wiikii/doku.php
multicopter.org
And finally, a couple of our photos:


Source: https://habr.com/ru/post/161813/
All Articles