Using the Internet to control robots from space
October 17, 2012
ESA and NASA tested a communications protocol that allows astronauts to control robots from space stations, orbital complexes around planets or asteroids. Next week, testing is scheduled with the ISS astronaut.
Last week, the Boulder University Space Station User Center, USA sent a team to the NASA laptop on the International Space Station to launch a script that controlled Mocup Rover at the European Space Agency's ESOC Operations Center (ESA) in Darmstadt, Germany. Rover was given orders to move forward and take pictures that he performed as planned.
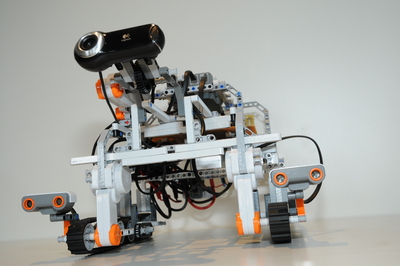
Mocup enlarge image 1119Kb . Source: ESA
')
Mocup is one of the ESA Meteron test rovers, an initiative for future missions to the Moon, Mars and other celestial bodies.

Big Image Mocup 1176Kb
Space exploration is likely to follow the path of sending robot researchers to search for water on uncharted planets before sending people to these lands.
In the case of distant planets, these robots will be able to be controlled by astronauts from a spacecraft in orbit around the planet.
“In these tests, we pretend that the Earth is the Moon or Mars,” says Kim Nergaard, the operational manager of the ground department of the Meteron project.
Reliable connection
Sending a command along this path is not as simple as it may seem. Links can be interrupted if there is no direct visibility between the Earth or a device on the surface.
A system must be developed that will ensure proper operation even in less than ideal conditions. Scientists have developed the Disruptive Tolerance Network (noise-resistant network) as a form of “Internet space” for reliable communication.
The network protocol remembers the commands if the signal is lost, and sends them as soon as the communications have been restored.
Now that the first communications test is completed, the laptop will be transferred to the ISS at the ESA command center from the operations center in Belgium.

. Large Image 1774Kb
Next week, NASA astronaut Sunita Williams will for the first time control the Mocup rover from space in real time.
She will use the entrance sent to her directly from the rover itself. ESOC will only monitor the process for further analysis.
“This is the first step to verifying the system needed for the future mission of a manned Mars mission,” says Kim. "As soon as we confirm that the link works, we will begin testing the hardware and operations."
ESA and NASA tested a communications protocol that allows astronauts to control robots from space stations, orbital complexes around planets or asteroids. Next week, testing is scheduled with the ISS astronaut.
Last week, the Boulder University Space Station User Center, USA sent a team to the NASA laptop on the International Space Station to launch a script that controlled Mocup Rover at the European Space Agency's ESOC Operations Center (ESA) in Darmstadt, Germany. Rover was given orders to move forward and take pictures that he performed as planned.
Mocup enlarge image 1119Kb . Source: ESA
About Mocup
In the framework of the Meteron project (Multi-purpose End-To-End Robotic Operations Network) - a multi-purpose End-to-End robot operation network, astronauts will test the control of the Mocup robot from the ESA Operations Center, Darmstadt, Germany.
Mocup is an abbreviation for the Meteron Operations and Communications Prototype.
Mocup is an abbreviation for the Meteron Operations and Communications Prototype.
')
Mocup is one of the ESA Meteron test rovers, an initiative for future missions to the Moon, Mars and other celestial bodies.
Big Image Mocup 1176Kb
Space exploration is likely to follow the path of sending robot researchers to search for water on uncharted planets before sending people to these lands.
In the case of distant planets, these robots will be able to be controlled by astronauts from a spacecraft in orbit around the planet.
“In these tests, we pretend that the Earth is the Moon or Mars,” says Kim Nergaard, the operational manager of the ground department of the Meteron project.
Reliable connection
Sending a command along this path is not as simple as it may seem. Links can be interrupted if there is no direct visibility between the Earth or a device on the surface.
A system must be developed that will ensure proper operation even in less than ideal conditions. Scientists have developed the Disruptive Tolerance Network (noise-resistant network) as a form of “Internet space” for reliable communication.
The network protocol remembers the commands if the signal is lost, and sends them as soon as the communications have been restored.
Now that the first communications test is completed, the laptop will be transferred to the ISS at the ESA command center from the operations center in Belgium.
. Large Image 1774Kb
Sunites Williams spacewalk
(NASA astronaut Sunita Williams, 32 expedition flight engineer, during her third spacewalk at her mission. During a spacewalk that lasted 6 hours and 28 minutes on September 5, 2012, Sunita Williams and Japanese astronaut Akihiko Hoside completed repair MKS MBSU power system backup unit. They also installed a camera on the Canadarm2 station robot manipulator. In the background to the right is the ESA Columbus ESA laboratory.
(It is noteworthy that the first attempt to install the backup unit stuck one of the two bolts, and the astronauts using a set of improvised tools, one of which was made of a metal pin and a toothbrush, cleaned the bolts and holes for them, and then put the backup unit in place - Cholgaa)
(It is noteworthy that the first attempt to install the backup unit stuck one of the two bolts, and the astronauts using a set of improvised tools, one of which was made of a metal pin and a toothbrush, cleaned the bolts and holes for them, and then put the backup unit in place - Cholgaa)
Next week, NASA astronaut Sunita Williams will for the first time control the Mocup rover from space in real time.
She will use the entrance sent to her directly from the rover itself. ESOC will only monitor the process for further analysis.
“This is the first step to verifying the system needed for the future mission of a manned Mars mission,” says Kim. "As soon as we confirm that the link works, we will begin testing the hardware and operations."
Source: https://habr.com/ru/post/155433/
All Articles