SDS-TWR Distance Measurement without Roulette and Sync

This topic continues the series devoted to the new technology of positioning (location) of people and objects in the room (in the territory). Previously published: http://habrahabr.ru/post/151496/ and http://habrahabr.ru/post/153237/ .
Positioning in the RTLS system is carried out by measuring the distance from the mark to three or more anchors with the subsequent calculation of the coordinates of the mark. And the SDS-TWR method (symmetric two-way bidirectional distance measurement) ensures the required accuracy without resorting to costly synchronization.
The method is governed by ISO / IEC 24730-5 and IEEE 802.15.4-2011.
In the RTLS system, the distance is measured between the tag and the anchor — two wireless devices that are not synchronized with each other. Measurement is carried out in the process of exchanging packets: request - response.
The sequence of packet exchange during measurement is shown in the figure:
')
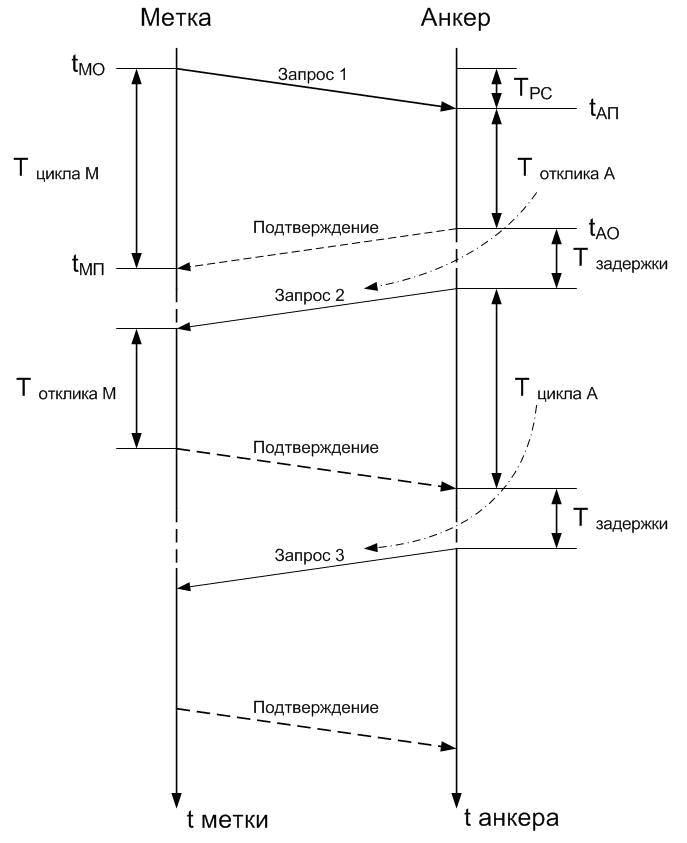
To ensure the required accuracy, two symmetrical measurement cycles are performed. The first is initiated by the tag, the second - by the anchor.
In the first loop, the tag sends an anchor request packet, noting the moment of dispatch. The packet reaches the anchor through the time interval necessary for the radio signal to walk the distance from the mark to the anchor - time of flight. Actually, this is the time required to measure to determine the distance. The anchor marks the moment of arrival of the packet, and by its internal clock counts from this moment the standard length of time - the response time (according to the standard up to five milliseconds) and sends a confirmation packet to the label. After the time of flight, the confirmation reaches the mark, and the mark determines the cycle time from the moment the request is sent until the confirmation is received. Cycle time consists of twice the time of flight and anchor response time.
It would seem that this is enough to determine the distance between the mark and the anchor: subtract the response time from the cycle time and divide it in half. This is true, but the accuracy of this measurement will be low. The fact is that the result will include the accuracy of the clock (quartz) mark plus the error of the clock (quartz) anchor. ISO / IEC 24730-5 limits the permissible error of clock generators to 80 ppm (parts per million). It is easy to calculate that for a response time of 5 ms, the measurement error will be 200 ns. (More calculation is here: http://www.rtlsnet.ru/technology/view/2 ). If we multiply this error by the speed of radio signal propagation - about 300 million meters per second or 0.3 m / ns, we get an error of 60 m. It would seem logical that the proposals to reduce the response time or improve the accuracy of quartz do not pass. In the first case, it is necessary to reduce the packet length and, accordingly, its payload. In the second, it is unnecessary to increase the price of the device, since the price of quartz with increasing accuracy is growing rapidly.
Output - in the use of the second, symmetric first measurement cycle.
Now the anchor, after waiting for a certain delay time, sends its request packet to the label. And at the same time in the payload of the packet tells the label the response time of the first cycle. In this cycle, the label already counts the response time by its own clock, and the anchor measures its time for the second cycle and then sends the result to the label.
Upon completion of the packet exchange, four values are available to the tag: response time and cycle time, measured by time tag and response time and cycle time, measured by an anchor. These values are sent to the server to calculate the distance.
The server summarizes the label's cycle time and the anchor's cycle time, subtracts the label's response time and the anchor's response time, and divides the result into four.
It would seem that everything is in the first case. However, now the measurement error in one direction is mostly compensated by the measurement error in the opposite direction and affects only the difference between the response times of the tag and the anchor. (Details here: http://www.rtlsnet.ru/technology/view/2 ) And since this difference in accordance with the ISO / IEC 24730-5 standard should not exceed one microsecond, the maximum measurement error becomes equal to 40 ps. Or in terms of distance - 12 mm.
Such is the error of the method.
Naturally, additional errors introduce dispersion delay lines, multipath attenuation and other factors, but these are already implementation problems. For example, Nanotron Technologies, a leading global manufacturer of such systems and chips, provides positioning accuracy in rooms of 2 meters, using the readings of an accelerometer embedded in a MEMS tag, can increase accuracy to 1 meter.
Source: https://habr.com/ru/post/154445/
All Articles