How it's assembed - Robotic machine. Step one
Assembling a robot by ordering a ready-made designer on a website is not a tricky thing. I connected the connectors according to the instructions, twisted the screws and nuts, at least soldering, the device is ready for a miracle!
However, we are not looking for easy ways, and in order to go through all the circles of hell, having understood how all the electronics work, the interaction of the modules, the movement of mechanics; what is even more cunning is to calculate all this by means of TAU, identification, termekh, this is the height of skill. Why? Yes, because with the next malfunction you will not throw your pet on the top shelf, but at least you will try to figure it out, and the maximum will correct this malfunction. But what is even more interesting is that you can upgrade your cyborg to a really standing machine.
So let's get started.
Idea: Build a robotic device such as “quadcopter”, without ordering a ready-made device “out of the box”, but gradually collect the mechanics and electronics of the device, in order to be able to further modify ... well, self-interest.
Ordering parts in a big city is a trifling matter, you are looking for a company, you negotiate, buy, take away - a trivial chain of operations. However, in small towns, in which I arrive, these actions translate into slightly larger sums, and quite long delivery times.
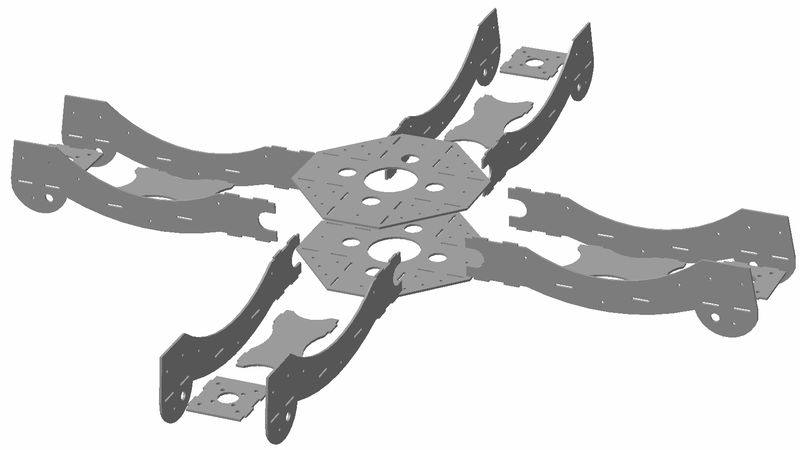
The manufacture of the device begins with the body.
The size, weight and design of the frame will determine in the future not only the characteristics of the device, but also its appearance. Nuances of a huge amount even at this stage. Aerodynamics, rigidity, strength, vibration resistance, modularity - this is not a frail list of parameters that need to be taken into account, having a shallow knowledge in all directions. However, the human brain is such an interesting "thing" that can combine all this and produce a suitable composition.
Solution: Usually, considering forums, you come across trivial solutions to this problem: a stick (aluminum, rarely carbonic) - as a frame beam. And what a vigorous option: the aerodynamics of the stick is indisputable, you can always replace it, too, God forbid. But as noted above, simple solutions are unacceptable. Having skills in CAD, KOMPAS, Solid, development of drawings of the body will not be a difficult problem. Moreover, all manufacturers use a compatible format for their machines.
')
As the material of the body was chosen fiberglass.
Lightweight - By removing excess material, you can achieve an acceptable weight.
Durable - the composition of longitudinal and transverse fibers makes it stronger than many plastics and even metals.
The choice is obvious, and as another plus is a relatively inexpensive material that is easy to process.
The choice of the manufacturer went to the Moscow company, despite the distance. There are actually a lot of options, but it was there that I made a couple of constructive comments on the improvement of the project, regarding the connecting elements, and not stupidly stuck into the machine and made as it is.
A couple of weeks of anxious expectations were met by the result of the work.
Engines
A huge selection of brushless motors provides good opportunities for the selection of parameters. The choice was made in favor of the engines Pilotage DT2209 / 28 Delux

They also need an electronic control device - a stroke controller , controlled by a PWM signal from the control board with a maximum allowable current of 12A. Pilotage Stamina12A V2

4 pieces each, as practice has shown, is not enough due to force majeure circumstances. The length of the wires from the battery can not be increased. However, having done this, I increased the convenience of connecting the battery, such as "the wires are not all tight, but freely reach to any position." As a result, the regulator burned into a gray acrid smoke, and partially melted.
With screws it is relatively simple - the longer the more thrust, however, control is lost. The trade-off between these two parameters determines the choice. It is also necessary to remember that the screws must be counter-directed in pairs to compensate for the torque of each other.

Further - more interesting. It would seem that all 4 were connected to the controller, which generates a pulse-width signal and that it is ready, you can fly. It is possible, but not for long, the engines, by virtue of their mechanical characteristics, rotate, albeit with an insignificant, but still divergence. As a result - instability, expressed in the collapse of the apparatus. There is a way out - accelerometers, adjusting the speed of the engines depending on the projection of apparent acceleration, can be achieved stabilization, but this is only in theory.
The dog is covered in the fact that vibration is transmitted from the engines to the body, and the accelerometer, even damped by vibration-resistant pads, catches them all, as a result a very noisy signal is obtained.
To smooth the characteristics, you can use various methods, for example, the program method of average squares, or a low-pass filter at the accelerometer output. However, for really high-quality correction, gyroscopes are used together with accelerometers. Gyros do not catch the noise from vibration, but have a drift. By combining device data using a software-implemented complementary algorithm, or a Kalman filter, it is possible to achieve an accurate determination of the roll and pitch angles.
The spatial orientation system must be implemented as a separate module and a microcontroller for the software implementation of the algorithm. The benefit of Open Source projects provide access to the layout of circuit boards. The solution was the scheme of the open project arduimu.
The search for the manufacturer did not last long; the Yekaterinburg company politely (for a fixed price) agreed to make high-quality boards and even with silk-screen printing, explaining ways to reduce the cost by reducing the accuracy class. For this we had to redo the scheme. Components from different online stores with different terms. As a result, davolno long wait, the device turned out many times cheaper than the original.
Management is also software on a compatible board.

Telemetry is collected from sensors via the I2C interface.
In the process of flying the main consumables are screws, so you need to order with a margin.
Touch sensors, barometers, GPS modules, cameras, even weapons - these are just a small list of what a robot can be equipped with, not to mention a constant software update.

However, we are not looking for easy ways, and in order to go through all the circles of hell, having understood how all the electronics work, the interaction of the modules, the movement of mechanics; what is even more cunning is to calculate all this by means of TAU, identification, termekh, this is the height of skill. Why? Yes, because with the next malfunction you will not throw your pet on the top shelf, but at least you will try to figure it out, and the maximum will correct this malfunction. But what is even more interesting is that you can upgrade your cyborg to a really standing machine.
So let's get started.
Idea: Build a robotic device such as “quadcopter”, without ordering a ready-made device “out of the box”, but gradually collect the mechanics and electronics of the device, in order to be able to further modify ... well, self-interest.
Ordering parts in a big city is a trifling matter, you are looking for a company, you negotiate, buy, take away - a trivial chain of operations. However, in small towns, in which I arrive, these actions translate into slightly larger sums, and quite long delivery times.
The manufacture of the device begins with the body.
The size, weight and design of the frame will determine in the future not only the characteristics of the device, but also its appearance. Nuances of a huge amount even at this stage. Aerodynamics, rigidity, strength, vibration resistance, modularity - this is not a frail list of parameters that need to be taken into account, having a shallow knowledge in all directions. However, the human brain is such an interesting "thing" that can combine all this and produce a suitable composition.
Solution: Usually, considering forums, you come across trivial solutions to this problem: a stick (aluminum, rarely carbonic) - as a frame beam. And what a vigorous option: the aerodynamics of the stick is indisputable, you can always replace it, too, God forbid. But as noted above, simple solutions are unacceptable. Having skills in CAD, KOMPAS, Solid, development of drawings of the body will not be a difficult problem. Moreover, all manufacturers use a compatible format for their machines.
')
As the material of the body was chosen fiberglass.
Lightweight - By removing excess material, you can achieve an acceptable weight.
Durable - the composition of longitudinal and transverse fibers makes it stronger than many plastics and even metals.
The choice is obvious, and as another plus is a relatively inexpensive material that is easy to process.
The choice of the manufacturer went to the Moscow company, despite the distance. There are actually a lot of options, but it was there that I made a couple of constructive comments on the improvement of the project, regarding the connecting elements, and not stupidly stuck into the machine and made as it is.
A couple of weeks of anxious expectations were met by the result of the work.
Engines
A huge selection of brushless motors provides good opportunities for the selection of parameters. The choice was made in favor of the engines Pilotage DT2209 / 28 Delux
They also need an electronic control device - a stroke controller , controlled by a PWM signal from the control board with a maximum allowable current of 12A. Pilotage Stamina12A V2
4 pieces each, as practice has shown, is not enough due to force majeure circumstances. The length of the wires from the battery can not be increased. However, having done this, I increased the convenience of connecting the battery, such as "the wires are not all tight, but freely reach to any position." As a result, the regulator burned into a gray acrid smoke, and partially melted.
With screws it is relatively simple - the longer the more thrust, however, control is lost. The trade-off between these two parameters determines the choice. It is also necessary to remember that the screws must be counter-directed in pairs to compensate for the torque of each other.
Further - more interesting. It would seem that all 4 were connected to the controller, which generates a pulse-width signal and that it is ready, you can fly. It is possible, but not for long, the engines, by virtue of their mechanical characteristics, rotate, albeit with an insignificant, but still divergence. As a result - instability, expressed in the collapse of the apparatus. There is a way out - accelerometers, adjusting the speed of the engines depending on the projection of apparent acceleration, can be achieved stabilization, but this is only in theory.
The dog is covered in the fact that vibration is transmitted from the engines to the body, and the accelerometer, even damped by vibration-resistant pads, catches them all, as a result a very noisy signal is obtained.
To smooth the characteristics, you can use various methods, for example, the program method of average squares, or a low-pass filter at the accelerometer output. However, for really high-quality correction, gyroscopes are used together with accelerometers. Gyros do not catch the noise from vibration, but have a drift. By combining device data using a software-implemented complementary algorithm, or a Kalman filter, it is possible to achieve an accurate determination of the roll and pitch angles.
The spatial orientation system must be implemented as a separate module and a microcontroller for the software implementation of the algorithm. The benefit of Open Source projects provide access to the layout of circuit boards. The solution was the scheme of the open project arduimu.
The search for the manufacturer did not last long; the Yekaterinburg company politely (for a fixed price) agreed to make high-quality boards and even with silk-screen printing, explaining ways to reduce the cost by reducing the accuracy class. For this we had to redo the scheme. Components from different online stores with different terms. As a result, davolno long wait, the device turned out many times cheaper than the original.
Management is also software on a compatible board.
Telemetry is collected from sensors via the I2C interface.
In the process of flying the main consumables are screws, so you need to order with a margin.
Touch sensors, barometers, GPS modules, cameras, even weapons - these are just a small list of what a robot can be equipped with, not to mention a constant software update.
Source: https://habr.com/ru/post/152050/
All Articles