Robotic tentacle with multiple degrees of freedom
Often, when creating manipulators for robots, not only the number of degrees of freedom and the grip strength are taken into account, but also the ability to work with soft objects without damaging them. The new pneumatic plastic manipulator-tentacle, created by scientists from the Harvard School of Engineering and Applied Sciences (USA), not only meets these requirements, but was much cheaper and more versatile existing analogues. In addition, it is so delicate that it can operate with such a delicate object as a flower without causing him the slightest damage.
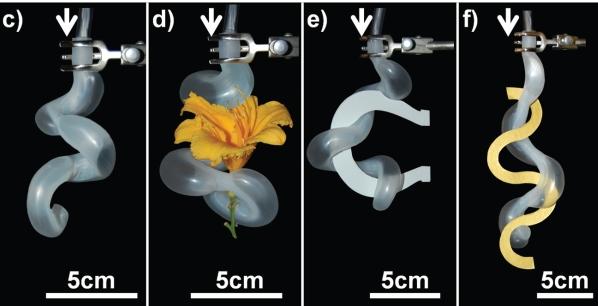
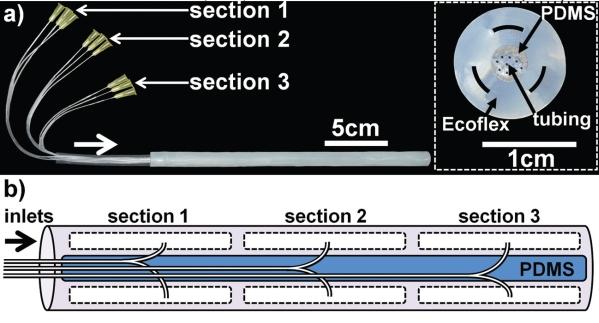
It is more habitual for a person to create limbs for robots that are the same or similar to those that he himself possesses. When creating the same manipulator, called the researchers "tentacle", the developers drew inspiration fromJapanese hentai creativity in the form of another creature that lives in the water element. The manipulator is created from a single plastic flexible tube with three internal sections, each of which consists of three to four channels, regardless of the adjacent air-filled to the required pressure, which contributes to the rotation of the robin girdle in the desired direction.

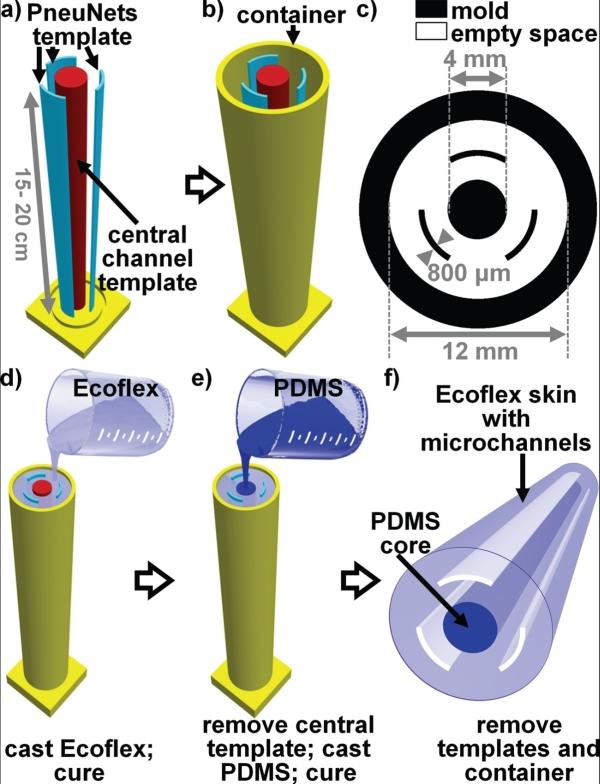
Thanks to numerous channels inside the tentacle, scientists were able to give it the ability to bend in three dimensions, and not in one, as it was implemented in previous developments of pneumatic manipulators. The materials used were low-cost elastomers , poured into a pre-printed form on a 3D printer. After the polymer cools, the central rod is removed, and its place is filled with another type of polymer PDMS , to impart relative rigidity to the whole structure. Peripheral profiles are then removed. After extraction from the mold, as a result, we see an elastomeric tentacle having three pneumatic channels located parallel to the central channel filled with PDMS.
The advantage of this technology is that it is possible to create channels of various numbers and configurations, which leaves a wide field for the improvement of technology, as well as adding additional functions to the tentacles, for expanding their possible applications.
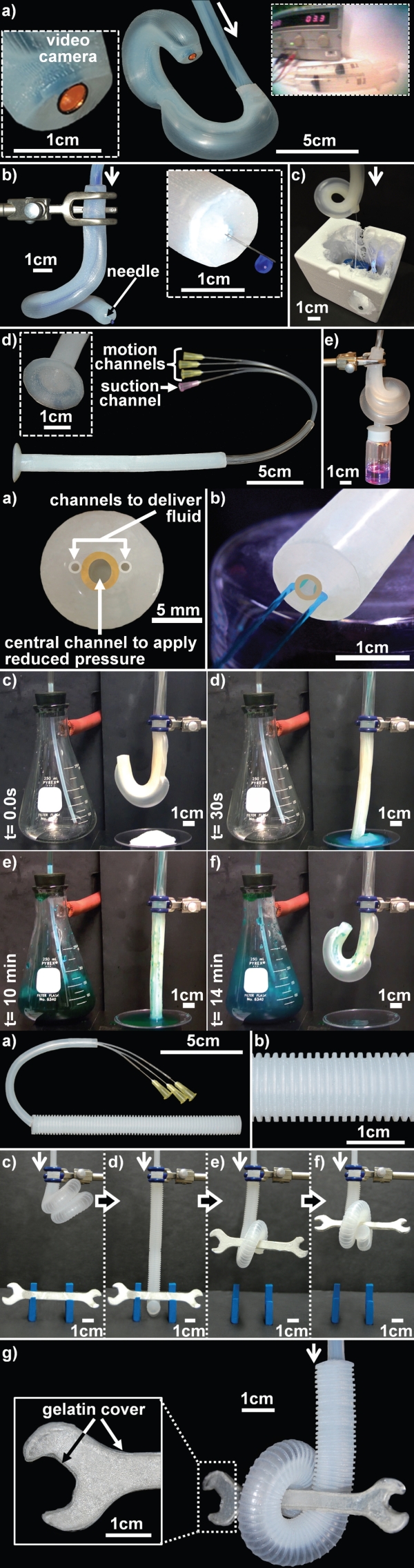
For example, among the promising findings of the team is the placement of a camera at the end, which allows for more accurate viewing of small objects, as well as (experimentally) a syringe and even a pneumatic sucker, which is capable of capturing objects firmly through an octopus and reducing pressure in the suction cup.
In short, this technology leaves a wide field for research and ideas where it can be applied. For example, you can use these tentacles as separate fingers of a certain robustness, which will give it much more mobility and opportunities than the usual one, with a limited number of degrees of freedom. Since the tentacle is fully pneumatic and without a solid frame, it can be blown off and put into the inner compartment of the robot, which will save space that can be used to place other tools.
')
For a more detailed study of the technology, you can read this PDF file (5.13mb)
It is more habitual for a person to create limbs for robots that are the same or similar to those that he himself possesses. When creating the same manipulator, called the researchers "tentacle", the developers drew inspiration from
Thanks to numerous channels inside the tentacle, scientists were able to give it the ability to bend in three dimensions, and not in one, as it was implemented in previous developments of pneumatic manipulators. The materials used were low-cost elastomers , poured into a pre-printed form on a 3D printer. After the polymer cools, the central rod is removed, and its place is filled with another type of polymer PDMS , to impart relative rigidity to the whole structure. Peripheral profiles are then removed. After extraction from the mold, as a result, we see an elastomeric tentacle having three pneumatic channels located parallel to the central channel filled with PDMS.
The advantage of this technology is that it is possible to create channels of various numbers and configurations, which leaves a wide field for the improvement of technology, as well as adding additional functions to the tentacles, for expanding their possible applications.
For example, among the promising findings of the team is the placement of a camera at the end, which allows for more accurate viewing of small objects, as well as (experimentally) a syringe and even a pneumatic sucker, which is capable of capturing objects firmly through an octopus and reducing pressure in the suction cup.
In short, this technology leaves a wide field for research and ideas where it can be applied. For example, you can use these tentacles as separate fingers of a certain robustness, which will give it much more mobility and opportunities than the usual one, with a limited number of degrees of freedom. Since the tentacle is fully pneumatic and without a solid frame, it can be blown off and put into the inner compartment of the robot, which will save space that can be used to place other tools.
')
For a more detailed study of the technology, you can read this PDF file (5.13mb)
Source: https://habr.com/ru/post/151395/
All Articles