Satellite system equipment AutoTracker - what's under the hood? GLONASS / GPS receivers
In the last post I told about satellite transport monitoring systems in general and how they appeared. Now we will begin to gradually get acquainted with the composition and components of the system. And let's start with the hardware basis of any monitoring system - an onboard navigation terminal (or a subscriber terminal or an onboard unit, each manufacturer usually has its own designation). The on-board unit is an electronic device that includes a satellite module (GPS or GLONASS / GPS), a data transmission module (GSM modem), a set of interfaces for communicating with external devices and sensors (most often RS-232/485, CAN, 1- Wire, USB) and a microcontroller that controls all of this. Also on board there is a certain amount of flash memory, sometimes a GSM antenna is built into the board, but these are already design features that we will talk about later. Today, I wanted to talk about one of the main components of the onboard unit - the GPS / GLONASS satellite receiver.
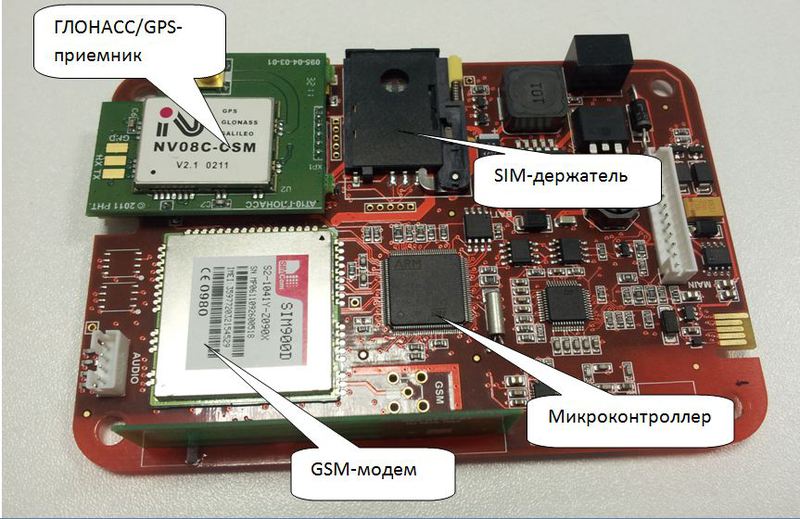
Typical GPS / GSM onboard unit layout
The actual active development of consumer GPS navigation equipment began in 2000, when the decree of the US President canceled the accuracy of GPS receivers in the civilian range, and it became possible to determine the location of an object with an error of 10-15 meters with a conventional “home” GPS receiver. . Electronic giants, such as Trimble, Tyco, uBlox, immediately enter the market of electronic components.
At that time, they were relatively bulky devices, the first GPS modules were the size of a matchbox (hereinafter, the navigation receiver refers to the electronic component, the module responsible for navigation, and not a complete device, such as a GPS navigator or GPS tracker) . For comparison, modern GPS chips used in AutoTracker units and representing a system on a chip (System-on-a-Chip, SoC) are about 0.25 cm² in size and even smaller. At the same time, it has several times higher sensitivity and more channels. Until 2007, the actual market of satellite electronic components in Russia was absent, the choice was very scarce. For example, the delivery time through the official distributor of a consignment of GPS modules of 1000 pieces could be six months or more. One of the first companies to enter the Russian market was the American Trimble Corporation. They immediately offered many interesting technical solutions, from electronic components to finished systems. At the same time, their products were of high quality at a low price. This was the reason why Trimble GPS receivers were in the first models of the AutoTracker’s on-board units.

The Trimble 46240-25 12-channel GPS receiver in 2005 has dimensions of 26 * 26 * 6 mm, which is not bad for its time. But the latest development of GPS chips is 500-700 times smaller than it!
But the market for electronic components developed rapidly and after 2007 new players came to Russia, including Chinese manufacturers. The competition has greatly intensified, the race for technology and prices has begun, and as a result, the receivers of 2005–2006 now look like giants.

The latest models of 56-channel GPS / GLONASS modules can easily be integrated into any mobile device.
')
But in addition to the mass and dimensions of the receivers, all performance characteristics have improved significantly. In particular - the number of channels. Modern receiver contains 50-60 channels, against 12 in 2006. What does it affect? To determine two coordinates (longitude and latitude), a GPS receiver needs to have a signal from three satellites, and to determine three coordinates (longitude, latitude and height) from four satellites. But for confident operation, the receiver must be able to work with a large number of satellites. For example, if a signal is lost from one satellite, the GPS receiver will be able to use another available channel. It can be said that an 8-channel receiver is in most cases sufficient for normal operation. With a further increase in the number of channels for GPS, it becomes possible to receive several signals from one satellite (primary and reflected). The use of a large number of channels increases the overall sensitivity and noise immunity of the receiver, which ultimately leads to an increase in accuracy and a decrease in the time to determine the coordinates.
Another very important parameter of the navigation receiver is sensitivity. The higher it is, the weaker the signal from the satellite can be received, the more chances the receiver will determine the coordinates accurately. The sensitivity of the GPS receiver is determined, among other things, by the characteristics of processing and analyzing signals received from satellites. The main parameter of the received signal is its ranging distance, which can be calculated using a set of correlators. To achieve high sensitivity, a GPS receiver must simultaneously analyze a sufficient number of signal delays. The presence of a large number of correlators significantly improves the performance of the receiver, which leads to improved sensitivity and reduced time to first position determination (Time To First Fix, TTFF). Thus, in GPS modules that appeared in 2008 (mainly on the SiRF Star III chip), the total number of parallel correlators is 200,000, which allows the modules to achieve a sensitivity of –159 dBm. In conditions of good reception, this means that the capture signal occurs almost instantly. Up to this point, the typical number of correlators in the GPS receiver was 8-10 thousand (for example, uBlox ANTARIS 4). All these parameters are necessarily taken into account when selecting components and developing onboard equipment AutoTracker.
A separate topic - receivers GLONASS. Their active production began relatively recently. This was facilitated by political factors - on February 18, 2009, the Federal Law “On Navigation Activities” entered into force, and later a number of legislative acts obliging state transport, transport carrying passengers, dangerous goods, etc., should be equipped with a navigation system with GLONASS support. . Such coercive measures have pushed the development of GLONASS consumer navigation equipment. At first, there were no offers from developers and manufacturers of receivers at all. Those single and small-scale copies of Russian receivers did not withstand any criticism and could not compete in terms of performance with GPS equipment. At the same time they were worth fabulous money, their cost reached $ 250-300.

One of the first GLONASS modules
There were few people who wanted to buy such devices, but a compromise solution was found. The onboard AutoTracker unit remained unchanged with the standard GPS, and in case of urgent need, an external GLONASS module was connected to it. This allowed us not to carry out a complete replacement of automobile units, but to implement a kind of their modernization.
Later, after about a year, the Russian enterprises started producing small batches of GLONASS receivers of more or less acceptable quality and characteristics. The GPS was still far away, but they worked quite well, resembled the same Trimble of 2005 in size. And besides, they were all (and are) dual-system - GLONASS / GPS, which made it possible to refine the data using signals from an alternative system.

Chip onboard AT-10 AutoTracker unit with GLONASS module manufactured by NAVIS Design Bureau
Prices at this point also decreased significantly. But about a year has passed, and foreign developments of GLONASS receivers have appeared. They were compact, high-tech and very close in characteristics and price to the GPS. A significant moment was the emergence of an iPhone 4S smartphone with GLONASS support. Perhaps this was the impetus for international electronic companies to produce GLONASS equipment. Now GLONASS versions of navigation receivers are available at most major foreign manufacturers - Trimble, uBlox, SiRF, Telit, etc.

GLONASS / GPS / Gallileo module of the company Telit with dimensions of 16 * 12.2 * 2.4 mm is quite an acceptable alternative to the traditional GPS-module
And we continue to closely monitor this market, regularly analyze and test samples of new receivers in order to implement the best developments in the onboard unit. We will acquaint you with the methodology and results of such tests in one of the following posts.
Typical GPS / GSM onboard unit layout
The actual active development of consumer GPS navigation equipment began in 2000, when the decree of the US President canceled the accuracy of GPS receivers in the civilian range, and it became possible to determine the location of an object with an error of 10-15 meters with a conventional “home” GPS receiver. . Electronic giants, such as Trimble, Tyco, uBlox, immediately enter the market of electronic components.
At that time, they were relatively bulky devices, the first GPS modules were the size of a matchbox (hereinafter, the navigation receiver refers to the electronic component, the module responsible for navigation, and not a complete device, such as a GPS navigator or GPS tracker) . For comparison, modern GPS chips used in AutoTracker units and representing a system on a chip (System-on-a-Chip, SoC) are about 0.25 cm² in size and even smaller. At the same time, it has several times higher sensitivity and more channels. Until 2007, the actual market of satellite electronic components in Russia was absent, the choice was very scarce. For example, the delivery time through the official distributor of a consignment of GPS modules of 1000 pieces could be six months or more. One of the first companies to enter the Russian market was the American Trimble Corporation. They immediately offered many interesting technical solutions, from electronic components to finished systems. At the same time, their products were of high quality at a low price. This was the reason why Trimble GPS receivers were in the first models of the AutoTracker’s on-board units.
The Trimble 46240-25 12-channel GPS receiver in 2005 has dimensions of 26 * 26 * 6 mm, which is not bad for its time. But the latest development of GPS chips is 500-700 times smaller than it!
But the market for electronic components developed rapidly and after 2007 new players came to Russia, including Chinese manufacturers. The competition has greatly intensified, the race for technology and prices has begun, and as a result, the receivers of 2005–2006 now look like giants.
The latest models of 56-channel GPS / GLONASS modules can easily be integrated into any mobile device.
')
But in addition to the mass and dimensions of the receivers, all performance characteristics have improved significantly. In particular - the number of channels. Modern receiver contains 50-60 channels, against 12 in 2006. What does it affect? To determine two coordinates (longitude and latitude), a GPS receiver needs to have a signal from three satellites, and to determine three coordinates (longitude, latitude and height) from four satellites. But for confident operation, the receiver must be able to work with a large number of satellites. For example, if a signal is lost from one satellite, the GPS receiver will be able to use another available channel. It can be said that an 8-channel receiver is in most cases sufficient for normal operation. With a further increase in the number of channels for GPS, it becomes possible to receive several signals from one satellite (primary and reflected). The use of a large number of channels increases the overall sensitivity and noise immunity of the receiver, which ultimately leads to an increase in accuracy and a decrease in the time to determine the coordinates.
Another very important parameter of the navigation receiver is sensitivity. The higher it is, the weaker the signal from the satellite can be received, the more chances the receiver will determine the coordinates accurately. The sensitivity of the GPS receiver is determined, among other things, by the characteristics of processing and analyzing signals received from satellites. The main parameter of the received signal is its ranging distance, which can be calculated using a set of correlators. To achieve high sensitivity, a GPS receiver must simultaneously analyze a sufficient number of signal delays. The presence of a large number of correlators significantly improves the performance of the receiver, which leads to improved sensitivity and reduced time to first position determination (Time To First Fix, TTFF). Thus, in GPS modules that appeared in 2008 (mainly on the SiRF Star III chip), the total number of parallel correlators is 200,000, which allows the modules to achieve a sensitivity of –159 dBm. In conditions of good reception, this means that the capture signal occurs almost instantly. Up to this point, the typical number of correlators in the GPS receiver was 8-10 thousand (for example, uBlox ANTARIS 4). All these parameters are necessarily taken into account when selecting components and developing onboard equipment AutoTracker.
A separate topic - receivers GLONASS. Their active production began relatively recently. This was facilitated by political factors - on February 18, 2009, the Federal Law “On Navigation Activities” entered into force, and later a number of legislative acts obliging state transport, transport carrying passengers, dangerous goods, etc., should be equipped with a navigation system with GLONASS support. . Such coercive measures have pushed the development of GLONASS consumer navigation equipment. At first, there were no offers from developers and manufacturers of receivers at all. Those single and small-scale copies of Russian receivers did not withstand any criticism and could not compete in terms of performance with GPS equipment. At the same time they were worth fabulous money, their cost reached $ 250-300.
One of the first GLONASS modules
There were few people who wanted to buy such devices, but a compromise solution was found. The onboard AutoTracker unit remained unchanged with the standard GPS, and in case of urgent need, an external GLONASS module was connected to it. This allowed us not to carry out a complete replacement of automobile units, but to implement a kind of their modernization.
Later, after about a year, the Russian enterprises started producing small batches of GLONASS receivers of more or less acceptable quality and characteristics. The GPS was still far away, but they worked quite well, resembled the same Trimble of 2005 in size. And besides, they were all (and are) dual-system - GLONASS / GPS, which made it possible to refine the data using signals from an alternative system.
Chip onboard AT-10 AutoTracker unit with GLONASS module manufactured by NAVIS Design Bureau
Prices at this point also decreased significantly. But about a year has passed, and foreign developments of GLONASS receivers have appeared. They were compact, high-tech and very close in characteristics and price to the GPS. A significant moment was the emergence of an iPhone 4S smartphone with GLONASS support. Perhaps this was the impetus for international electronic companies to produce GLONASS equipment. Now GLONASS versions of navigation receivers are available at most major foreign manufacturers - Trimble, uBlox, SiRF, Telit, etc.
GLONASS / GPS / Gallileo module of the company Telit with dimensions of 16 * 12.2 * 2.4 mm is quite an acceptable alternative to the traditional GPS-module
And we continue to closely monitor this market, regularly analyze and test samples of new receivers in order to implement the best developments in the onboard unit. We will acquaint you with the methodology and results of such tests in one of the following posts.
Source: https://habr.com/ru/post/150453/
All Articles