Ectognathus, hexapod robot on micro-servah with their own hands
Good afternoon, dear habrovchane. I present to your attention an article in which I describe the process of designing and creating a six-legged robot completely from scratch. You will not find here annoying arduins and ready-made Hexapod sets in 5 minutes. Due to the large amount of information, the article will consist of several parts, describing the various stages of design and illuminating the rake, which I stepped on in the process.
So, meet - Ectognathus.

For quite a long time I was planning to assemble a robot. To be more precise, I chose between several options - tracked and wheeled robots, I dismissed immediately, because This is a rather trivial decision, and the choice was mainly between a quadrocopter and a Hexapod.
I was always attracted to micro-quadcopters, but what always upset me about them was that they flew for a short time from the battery. Once I remembered that I had three micro-servos lying around, and in a day I assembled such a small robot:
')
It turned out, of course, clumsy and weakly controlled - because I had only three degrees of freedom for the whole body, but for some reason I liked it terribly to control it and write software for it.
Recalling my desire to collect something larger, I finally gave up the idea of the copter and decided to make a hexapod. I wrote this to a friend, and he decided to join the project.
Initially, we planned to assemble a robot with two servam on foot. This would reduce the price (12 servos versus 18!) And power consumption. In constructions of this kind, one servo controls the rotation of the leg in the horizontal plane, the second - its lift. The leg, as in the three-servo version, consists of two parts, but they are connected by a frame, and not by an additional servo drive. Thus, in extreme positions, the leg can either be “raised and pressed to the body” or “lowered to the surface and set aside”, unlike the three-session option.
To begin with, it was necessary to estimate the design of the leg, for which I decided to use Google SketchUp 3D. At that moment, I didn’t have any engineering software installed on my computer, or even a 3D modeling program, so I decided to download a free, and, according to many, simple software from Google. The final model was planned, of course, to do in SolidWorks.
Looking ahead, I will express my subjective opinion. Even for a quick test of this kind choose SolidWorks. After I switched to it, I realized that it is more convenient in any case. At least due to convenient bindings, model hierarchy, etc. Not to mention the fact that you do not have to do double work and redraw the model from your 3D program in solid. The Google program has only three advantages - free of charge, weight (30 meters) and a huge repository of models, in which users upload their creations, so, for example, the servo drive was already there.
So, I began with a Google-sketch and drew there such an approximate construction:
After thinking, redrawing and thinking again, it turned into this first:
and then into this:
All parts were designed for milling of aluminum, so they had to have either a flat shape or be obtained in the process of bending. Of course, it was still just a sketch, and not the most successful variant of execution, but it was decided to stop at this and choose servos. The main criteria were the size of the drives and their speed. Mostly on e-bay standard servos and microservs are presented. The standard servo drives have a healthy range of parameters and prices, the most expensive thing I've seen is a servo drive for 300 bucks a piece, the moment of which was about 60 kg * cm.
Microservs basically had a moment of 1-2 kg * cm and a speed of about 0.1. When I first started designing, I chose this servo, which was almost twice as fast as other microerms, at the same moment. But after I requested the drawings, it turned out that he was not even micro at all, but something between a micro and a standard one, and in the end I chose the same servo drives that I used to make my first three-servo robot, the MG90S three times cheaper than the past.
Also, in order not to order twice, I chose batteries for the robot in the same store. When I measured the current consumed by a three-serv robot, I, frankly, was surprised. In my opinion, it should have consumed about 300 mA, but in reality, the current value jumped from 500 to 700 mA, that is, the hexapod with 18 drives would have consumed six times more, about 4.5A at 6V power. Since the current turned out to be rather big, I decided to take some kind of lithium-polymer battery of a suitable size. Unfortunately, almost all large-capacity lithium-polymer batteries were very long (8-12 cm!), Which would have made the robot more torso than I expected, but, fortunately, there was one of them.
This battery was not only smaller in length, but also very narrow (the caliper showed a thickness of 17 mm). Asking the maximum consumption of 5A at 6V, that is, 30W, I decided to put two batteries on the robot, which gave a total of 2.4AH at 11.1V, that is, 26.64 WHF.
This means that even at maximum consumption, the robot must live for 53 minutes from them.
Since the servos were so cheap, it was decided to change the design and make a robot with three servas per leg. After that, in Google Sketch, I estimated the design of the robot, and this is what happened:

The robot is surrounded by its details.
As a result, I e-bay, I ordered 20 MG90S servo drives, two batteries and a charger for them. The whole order cost me almost exactly 200 bucks. After that, I finally established a solid and my friend and I started a real design.
At this stage, we divided the duties, a friend began to redraw parts of his leg in solid, and I started fixing the servos. Actually, it was one of the main components of the structure, which was the first joint of the leg and attached to the body, turning the leg in a horizontal and vertical plane. It was necessary to move from the sketch shown below to the actual construction.
In this case, the following problems occurred:
Based on this, the first design of the holder for two servo drives resulted in a rather obvious solution, shown below:
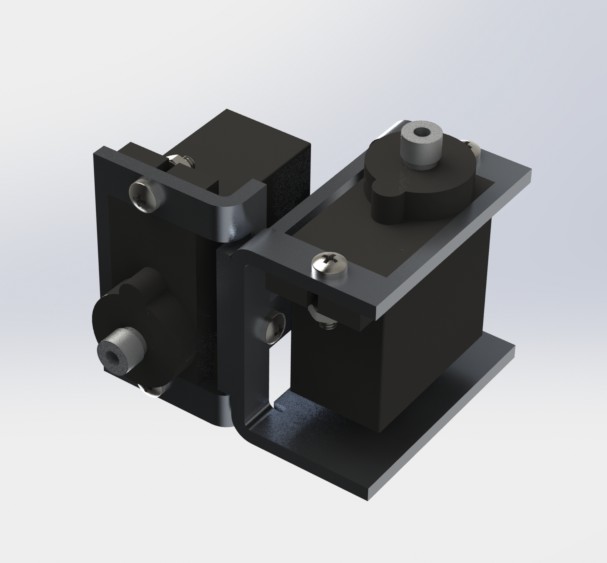
The node consisted of two brackets, screwed together with each other, to which servos were screwed.
In the bracket, designed for fastening the servo, performing rotation in the horizontal plane, a hole was made in front of its axis, into which it was supposed to insert a screw, which was supposed to serve as a continuation of the axis.
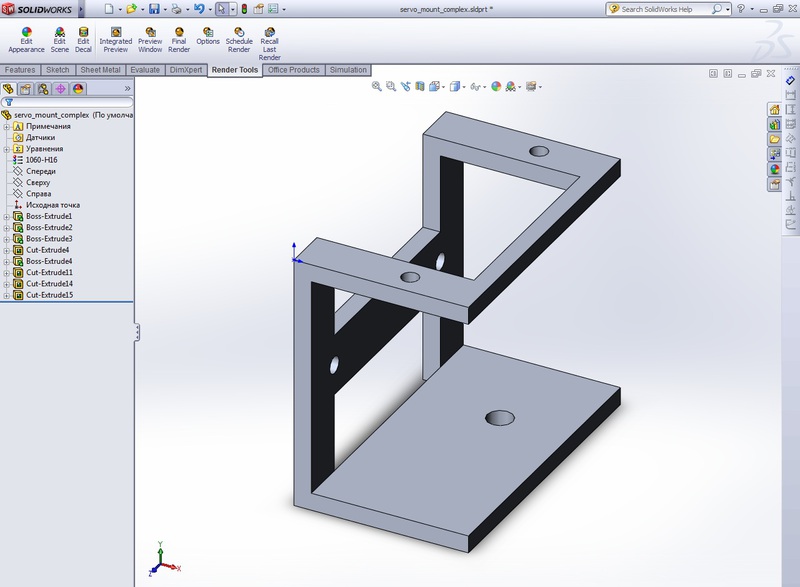
Both brackets were obtained from sheet aluminum by milling and subsequent bending. Solid provides a very convenient utility that allows you to get a detail scan without any effort, in a couple of clicks - for this it is enough to draw the part itself in the form in which you want to get it:
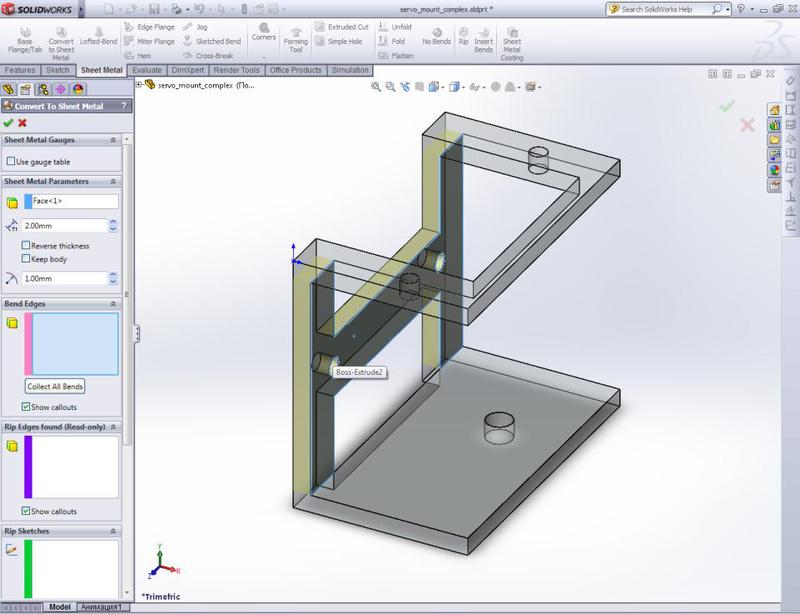
After that, choose in the menu Insert - Sheet Metal - Convert to sheet metal, specify the edge, relative to which we will bend, sheet thickness and bend radius:
After clicking OK, we get the final detail, the difference is visible to the naked eye:
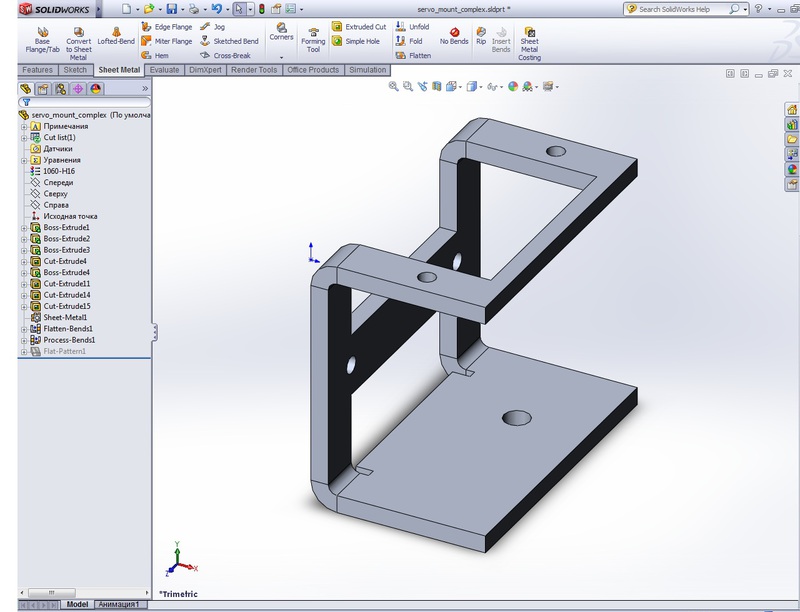
In the tree of operations on the left, besides the actually flexible one, another, inactive, Flat-Pattern appeared. Activating it, we get the desired contour for milling:
At the same time, the solid cares even about cuts into the parts, adding them, if necessary.
After the brackets for the drives, I sketched an approximate view of the body, and a friend took off two parts of the leg.
The final render turned out like this:
This model finally allowed to measure the mass of the robot. The results were as follows:
18 servos, 13.5 grams each = 243 grams, round up to 250 g
Two batteries of 75 grams = 150 g
The design (without cuts in the body), made of aluminum sheet 2 mm thick = 400 g
Thus, the total weight of the robot was 800 grams. Based on this value and the servo maximum moment (2.2 kg * cm), as well as a long viewing of various hetzapod videos on youtube, leg lengths were selected (those lengths that were used in the model shown above were taken only temporarily) .
As a result, it was decided to make the vertical part of the leg, “lower leg” 110 mm, horizontal, “thigh” - 60 mm, which gave a ratio close to 1: 2, which is usually observed in Hexapods, and the moment 6 * 0.8 = 4.8 kg * cm. One servo, of course, is not able to lift such a weight, but we have six legs, three of which constantly support the body, so the limiting moment per one servo can be taken equal to 4.8 / 3 = 1.6 kg * cm. In fact, since two drives are involved in lifting the leg, the actual moment turns out to be approximately two times smaller, that is, about 600 g * cm. If desired, it was possible to calculate the exact values with the help of sappra, adding loads to the model, but I decided to stay at a rough value, since the drives promised to greatly exceed it.
The model revealed one drawback - the batteries interfered with the rotation of the drives, if you place them inside the robot, so it was decided to transfer them to the roof.
In addition, I was worried about the design of the servo drive holders — I didn't want to order bending completely, and there was a wonderful prospect of spending the weekend with a vise trying to bend a thick aluminum sheet with acceptable accuracy.
After sitting for a while, I redid the holders, and this design was final, made in a real robot:
The assembly consists of two completely flat parts with slots for the protrusions of the servos and is screwed together using two standard racks. The axis, as before, is the screw, which, however, had to be replaced with a screw with a hidden head. Otherwise, one of the drives would rest against the head of the screw.
The legs were also redrawn, firstly the length of their parts was aligned, and secondly their shape was changed to more decorative, in order not to give the impression of spare parts from the children's designer:

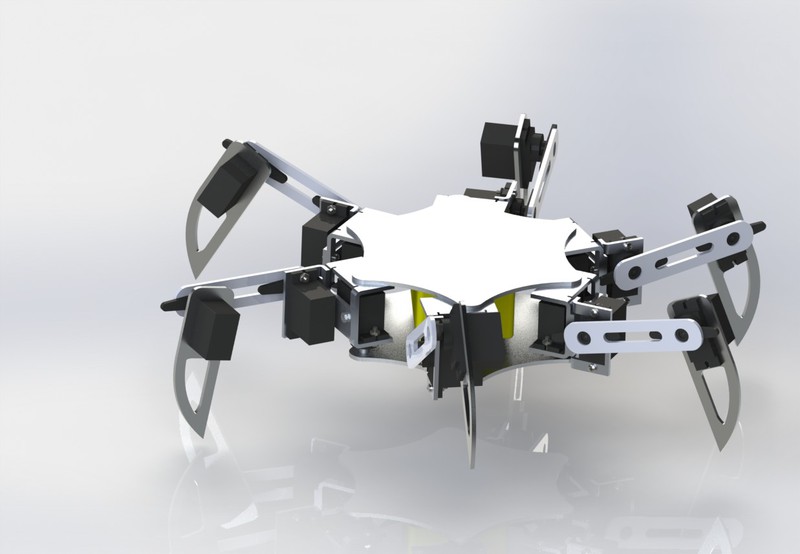
Finally, the result of all the work was a new model of the robot, which I present to your attention:
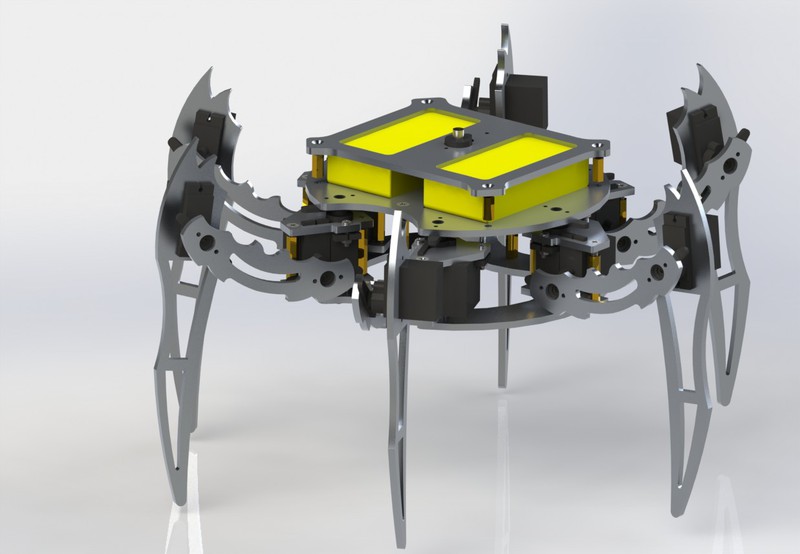
Then the robot received the name Ectognathus (from insecta ectognatha, one of the name of insects, also the great hexapoda, six-legged), for which thanks to another friend of mine.
After the model was completed, it was enough to drop the SolidWork files into any office engaged in milling and get the desired details. And since all of them in the final version were flat, no additional operations were required and immediately after milling it was possible to screw the structure in, having previously been purchased with screws, bearings, racks and gadgets.
At this design ended and began ...
Since this article has already turned out to be quite voluminous, the details of the transition from the model to the real device and the associated problems and jambs (of which it turned out to be quite a lot!) Are described in the next article .
Thanks for attention!
So, meet - Ectognathus.
For quite a long time I was planning to assemble a robot. To be more precise, I chose between several options - tracked and wheeled robots, I dismissed immediately, because This is a rather trivial decision, and the choice was mainly between a quadrocopter and a Hexapod.
I was always attracted to micro-quadcopters, but what always upset me about them was that they flew for a short time from the battery. Once I remembered that I had three micro-servos lying around, and in a day I assembled such a small robot:
')
It turned out, of course, clumsy and weakly controlled - because I had only three degrees of freedom for the whole body, but for some reason I liked it terribly to control it and write software for it.
Recalling my desire to collect something larger, I finally gave up the idea of the copter and decided to make a hexapod. I wrote this to a friend, and he decided to join the project.
Start of development
Initially, we planned to assemble a robot with two servam on foot. This would reduce the price (12 servos versus 18!) And power consumption. In constructions of this kind, one servo controls the rotation of the leg in the horizontal plane, the second - its lift. The leg, as in the three-servo version, consists of two parts, but they are connected by a frame, and not by an additional servo drive. Thus, in extreme positions, the leg can either be “raised and pressed to the body” or “lowered to the surface and set aside”, unlike the three-session option.
To begin with, it was necessary to estimate the design of the leg, for which I decided to use Google SketchUp 3D. At that moment, I didn’t have any engineering software installed on my computer, or even a 3D modeling program, so I decided to download a free, and, according to many, simple software from Google. The final model was planned, of course, to do in SolidWorks.
Looking ahead, I will express my subjective opinion. Even for a quick test of this kind choose SolidWorks. After I switched to it, I realized that it is more convenient in any case. At least due to convenient bindings, model hierarchy, etc. Not to mention the fact that you do not have to do double work and redraw the model from your 3D program in solid. The Google program has only three advantages - free of charge, weight (30 meters) and a huge repository of models, in which users upload their creations, so, for example, the servo drive was already there.
So, I began with a Google-sketch and drew there such an approximate construction:
After thinking, redrawing and thinking again, it turned into this first:
and then into this:
All parts were designed for milling of aluminum, so they had to have either a flat shape or be obtained in the process of bending. Of course, it was still just a sketch, and not the most successful variant of execution, but it was decided to stop at this and choose servos. The main criteria were the size of the drives and their speed. Mostly on e-bay standard servos and microservs are presented. The standard servo drives have a healthy range of parameters and prices, the most expensive thing I've seen is a servo drive for 300 bucks a piece, the moment of which was about 60 kg * cm.
Microservs basically had a moment of 1-2 kg * cm and a speed of about 0.1. When I first started designing, I chose this servo, which was almost twice as fast as other microerms, at the same moment. But after I requested the drawings, it turned out that he was not even micro at all, but something between a micro and a standard one, and in the end I chose the same servo drives that I used to make my first three-servo robot, the MG90S three times cheaper than the past.
Also, in order not to order twice, I chose batteries for the robot in the same store. When I measured the current consumed by a three-serv robot, I, frankly, was surprised. In my opinion, it should have consumed about 300 mA, but in reality, the current value jumped from 500 to 700 mA, that is, the hexapod with 18 drives would have consumed six times more, about 4.5A at 6V power. Since the current turned out to be rather big, I decided to take some kind of lithium-polymer battery of a suitable size. Unfortunately, almost all large-capacity lithium-polymer batteries were very long (8-12 cm!), Which would have made the robot more torso than I expected, but, fortunately, there was one of them.
This battery was not only smaller in length, but also very narrow (the caliper showed a thickness of 17 mm). Asking the maximum consumption of 5A at 6V, that is, 30W, I decided to put two batteries on the robot, which gave a total of 2.4AH at 11.1V, that is, 26.64 WHF.
This means that even at maximum consumption, the robot must live for 53 minutes from them.
Since the servos were so cheap, it was decided to change the design and make a robot with three servas per leg. After that, in Google Sketch, I estimated the design of the robot, and this is what happened:
The robot is surrounded by its details.
As a result, I e-bay, I ordered 20 MG90S servo drives, two batteries and a charger for them. The whole order cost me almost exactly 200 bucks. After that, I finally established a solid and my friend and I started a real design.
Design
At this stage, we divided the duties, a friend began to redraw parts of his leg in solid, and I started fixing the servos. Actually, it was one of the main components of the structure, which was the first joint of the leg and attached to the body, turning the leg in a horizontal and vertical plane. It was necessary to move from the sketch shown below to the actual construction.
In this case, the following problems occurred:
- MG90S, like most servos, have an axis on one side only. It would not be desirable to fasten them in one axis, since this can create undesirable deformations.
- Plastic “ears” for attaching the serva are also located only on the top, so one bracket was indispensable.
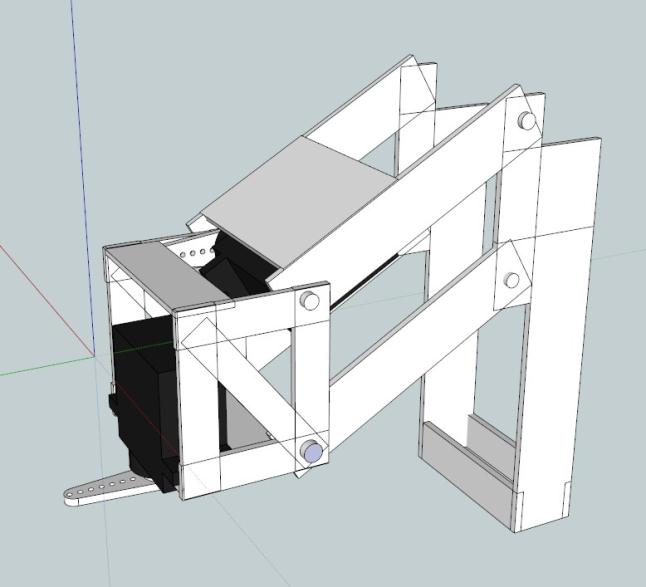
Based on this, the first design of the holder for two servo drives resulted in a rather obvious solution, shown below:
The node consisted of two brackets, screwed together with each other, to which servos were screwed.
In the bracket, designed for fastening the servo, performing rotation in the horizontal plane, a hole was made in front of its axis, into which it was supposed to insert a screw, which was supposed to serve as a continuation of the axis.
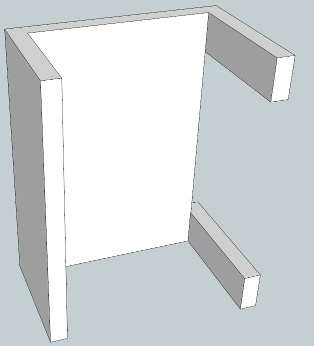
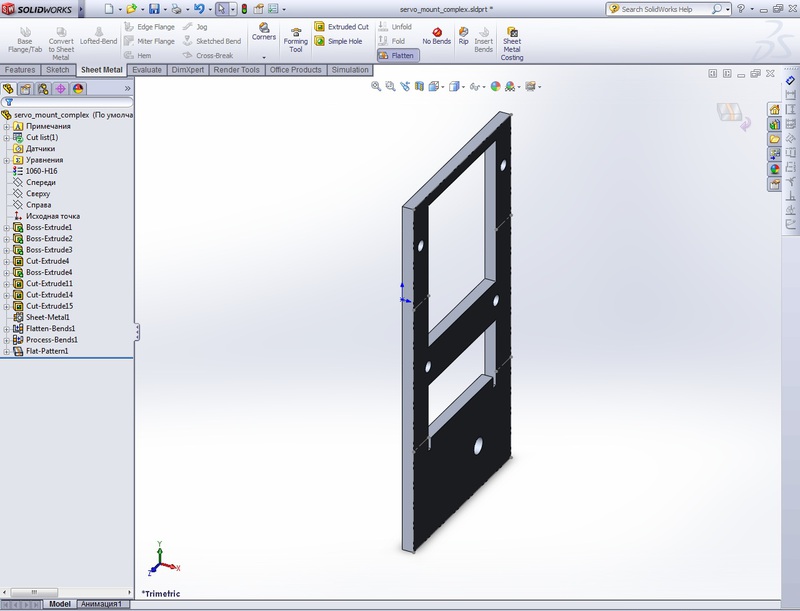
Both brackets were obtained from sheet aluminum by milling and subsequent bending. Solid provides a very convenient utility that allows you to get a detail scan without any effort, in a couple of clicks - for this it is enough to draw the part itself in the form in which you want to get it:
After that, choose in the menu Insert - Sheet Metal - Convert to sheet metal, specify the edge, relative to which we will bend, sheet thickness and bend radius:
After clicking OK, we get the final detail, the difference is visible to the naked eye:
In the tree of operations on the left, besides the actually flexible one, another, inactive, Flat-Pattern appeared. Activating it, we get the desired contour for milling:
At the same time, the solid cares even about cuts into the parts, adding them, if necessary.
After the brackets for the drives, I sketched an approximate view of the body, and a friend took off two parts of the leg.
The final render turned out like this:
This model finally allowed to measure the mass of the robot. The results were as follows:
18 servos, 13.5 grams each = 243 grams, round up to 250 g
Two batteries of 75 grams = 150 g
The design (without cuts in the body), made of aluminum sheet 2 mm thick = 400 g
Thus, the total weight of the robot was 800 grams. Based on this value and the servo maximum moment (2.2 kg * cm), as well as a long viewing of various hetzapod videos on youtube, leg lengths were selected (those lengths that were used in the model shown above were taken only temporarily) .
As a result, it was decided to make the vertical part of the leg, “lower leg” 110 mm, horizontal, “thigh” - 60 mm, which gave a ratio close to 1: 2, which is usually observed in Hexapods, and the moment 6 * 0.8 = 4.8 kg * cm. One servo, of course, is not able to lift such a weight, but we have six legs, three of which constantly support the body, so the limiting moment per one servo can be taken equal to 4.8 / 3 = 1.6 kg * cm. In fact, since two drives are involved in lifting the leg, the actual moment turns out to be approximately two times smaller, that is, about 600 g * cm. If desired, it was possible to calculate the exact values with the help of sappra, adding loads to the model, but I decided to stay at a rough value, since the drives promised to greatly exceed it.
The model revealed one drawback - the batteries interfered with the rotation of the drives, if you place them inside the robot, so it was decided to transfer them to the roof.
In addition, I was worried about the design of the servo drive holders — I didn't want to order bending completely, and there was a wonderful prospect of spending the weekend with a vise trying to bend a thick aluminum sheet with acceptable accuracy.
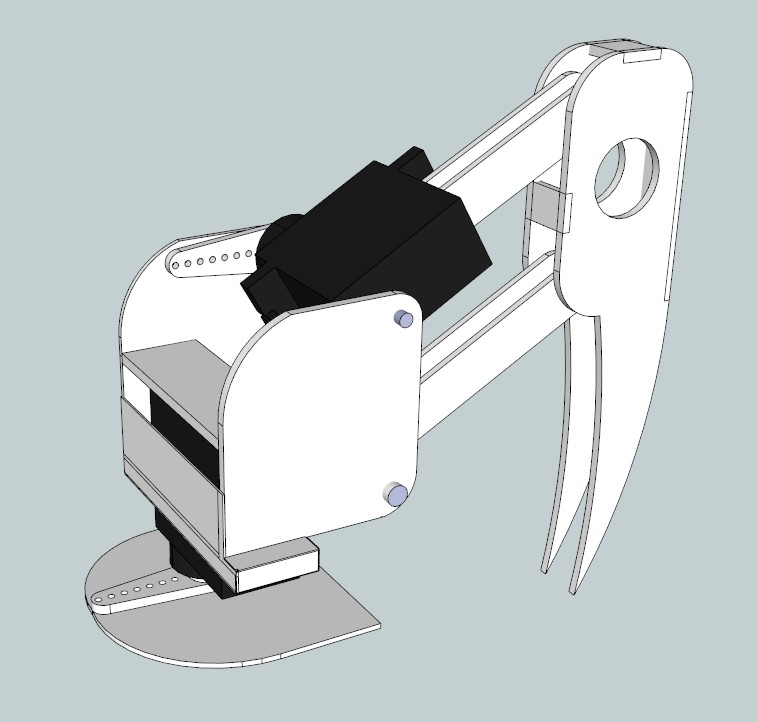
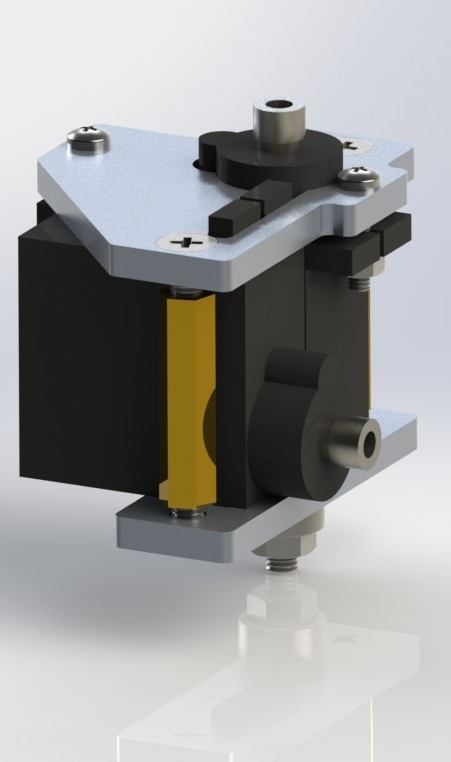
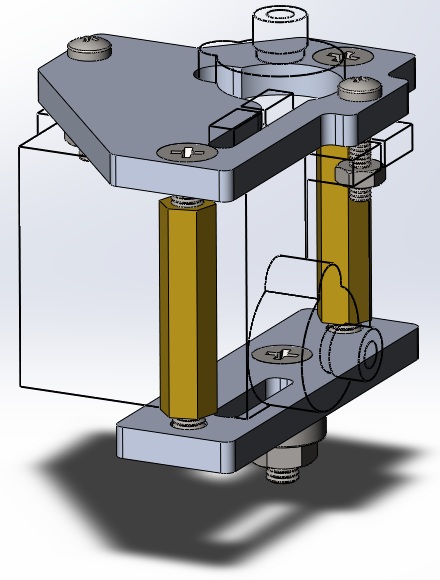
After sitting for a while, I redid the holders, and this design was final, made in a real robot:
The assembly consists of two completely flat parts with slots for the protrusions of the servos and is screwed together using two standard racks. The axis, as before, is the screw, which, however, had to be replaced with a screw with a hidden head. Otherwise, one of the drives would rest against the head of the screw.
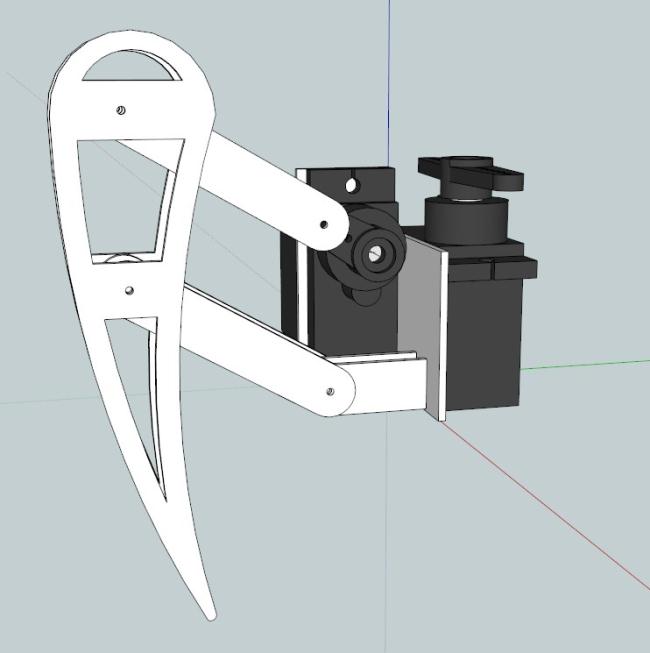
The legs were also redrawn, firstly the length of their parts was aligned, and secondly their shape was changed to more decorative, in order not to give the impression of spare parts from the children's designer:
Finally, the result of all the work was a new model of the robot, which I present to your attention:
Then the robot received the name Ectognathus (from insecta ectognatha, one of the name of insects, also the great hexapoda, six-legged), for which thanks to another friend of mine.
After the model was completed, it was enough to drop the SolidWork files into any office engaged in milling and get the desired details. And since all of them in the final version were flat, no additional operations were required and immediately after milling it was possible to screw the structure in, having previously been purchased with screws, bearings, racks and gadgets.
At this design ended and began ...
Production
Since this article has already turned out to be quite voluminous, the details of the transition from the model to the real device and the associated problems and jambs (of which it turned out to be quite a lot!) Are described in the next article .
Thanks for attention!
Source: https://habr.com/ru/post/148964/
All Articles