How does the unmanned car "Google"
The former secret Google project is now literally appearing in public: the company received a license for test trips on public roads in Nevada , and before that , those who wanted to go for a test trip on a closed site were invited .
At the moment, the fleet of robotic vehicles, the Toyota Prius, which has been owned by a search giant, has rewound more than 300 thousand kilometers in urban surroundings, on busy roads and mountain roads, with only partial human interventions. The project is still far from entering the market, but unmanned golf cards were installed on Google’s own campus, which clearly demonstrate how the new technology can change the world in the near future.
')
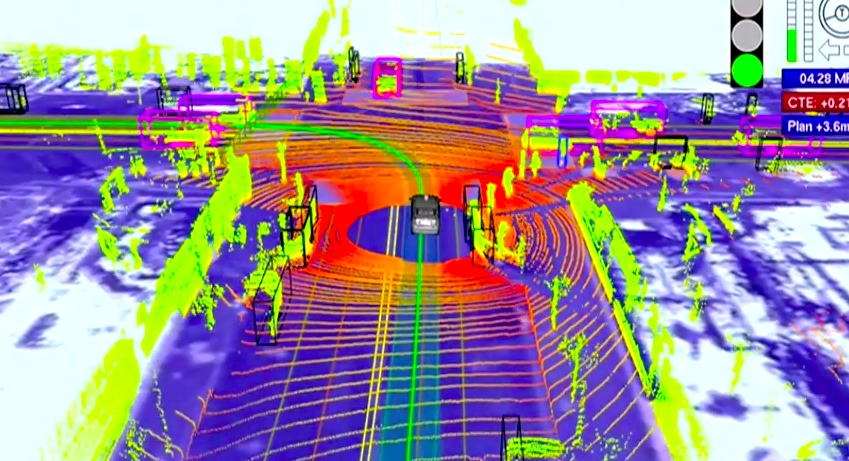
Last September, Sebastian Tran , professor of computer science at Stanford University, who leads development, and Chris Urmson, Google’s engineer, spoke about the main project ideas at the International Conference of Intelligent Robots and Systems at the Institute of Electrical and Electronics Engineers in San Francisco. They explained how the car works and showed several videos and road tests, including a small fragment of how the on-board computer "sees" other vehicles, pedestrians and adjusting lights.
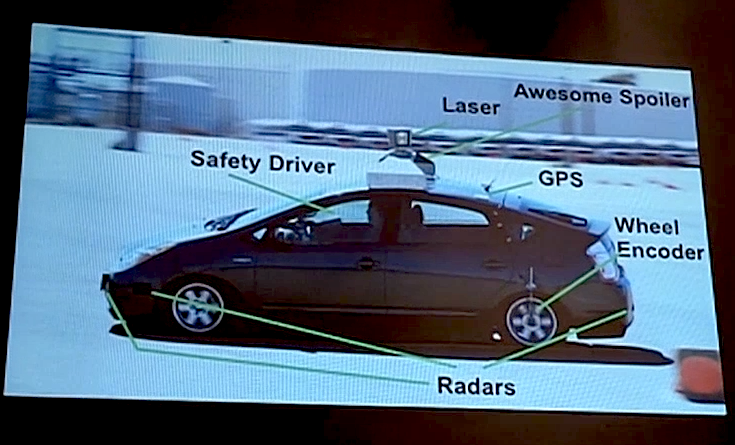
As Urmson, the technical project manager, said, the core of the system is a 64-beam laser rangefinder manufactured by Velodine , mounted on the roof of the car. The device helps to generate a detailed volumetric map of the surrounding space. The machine then combines laser measurements with high-precision maps of the world and produces various types of data models that allow driving, avoiding obstacles and problems with the law. Also on board are other sensors, including four radars on the front and rear bumpers, a camera next to the rear-view mirror; GPS sensor system, inertial measurement unit and wheel sensor, which determine the position of the vehicle and track movement.
Curious to note some details. First, the development of Google is highly dependent on well-developed maps of the Earth’s surface, which, according to Urmson, is an essential condition for accurately determining the location of the vehicle. Using the global navigation system can give an error of several meters.
Secondly, before sending the car to the unmanned ride, the engineers of Google go one or more times along the route to collect information about the surrounding space. When traveling offline, the machine compares data with previous states, which allows pedestrians to be separated from such stationary objects as, for example, mailboxes or poles. In the previous video the result was noticeable. At one point, the car stopped at a crossroads, and after a green light, it gave way to pedestrians before turning left and proceeding.

Sometimes the drone is forced to be more aggressive. For example, driving through an intersection, he misses other cars according to the rules of the road, but if other vehicles do not reciprocate, he jerks forward slightly to show intent. Without programming this behavior in the real world, the robot will not be able to drive.
Obviously, Google’s engineers like to work on the project - look at Urmson’s contented face on the 13th minute, when he, sitting in the driver’s seat, watches the drone chase through the company’s parking lot, creaking tires at every turn. But the project has a serious intention: Tran and many of his colleagues, including the founding fathers of Google, believe that “smart” cars will make movement on a car safer and more efficient: the cars will move closer to each other, which will increase the amount of free places on the roads. The program responds faster than a person, which will help avoid accidents and save thousands of lives.
Urmson also proposed a scenario in which vehicles become a common resource, a service that people can use if necessary. For the appearance of the car it will be enough just to choose the appropriate option in the smartphone, and on the trip you can relax in the driver's seat - you will not need to drive a car. At the conference, a video of the concept of “Caddy Beta” was shown, in the role of common cars - a golf card. For them, the filling is simpler than for the Toyota Prius samples: the sensors on vehicles interact with sensors located in the environment to determine the position and “learn” about the movement of others.
Tran and Urmson admit that there are still many unsolved problems ahead: improved reliability, legal issues of responsibility, but this does not stop them. As Tran said, the problems of transport, which are considered unprofitable by others, seem promising for them.
Source: https://habr.com/ru/post/143478/
All Articles