Well, a very inexpensive telepresence robot based on a laptop and motorcycle carts. Continuation
Recently on Habré was such an article about the cart. I read, was inspired, ordered myself and decided to write a small report about this toy after its waking.
Carefully, under the cut pictures.

In short, I will repeat what this device is. According to the idea of the developer, a certain construction with wheels is taken on which a netbook is placed. A netbook via usb-wire connects to the microcontroller of the trolley and allows you to control it from any program that knows how to work with Arduino (which is the main feature of this idea). The cart is remotely controlled by the operator, either from a stationary computer or through an Android application. When working using the built-in camera netbook.
')
It began with the order of the cart itself. The fact is that the company producing these devices is located in Canada, Vancouver, so the delivery of the package from there is a long-playing matter in itself. First I had to register on xaxxon.com and place an order. The cost of the trolley at the time of the order (and at the time of writing this article) was $ 269.99, and the cost of delivery to Russia - another $ 85.32

After ordering, Colin Adamson contacted me to clarify order details and payment. Payment is possible in two versions - by credit card through the company's website, or through PayPal (Colin issued a direct link to his company's page in PayPal).
After payment, I had to wait about a month and a half while they were collecting a new batch. The guys collaborate with some factories in Canada, where they produce cases and carts for the trolley. And so, on March 11 (after a long wait, however, it was replenished by the process of writing software under the cart), a letter arrived in the mail informing me that the order had been sent! Poor Colin, during these one and a half months I tortured him with questions about many moments in the board, its firmware, etc.
Fortunately, the letter contained the tracking number of the parcel, and it was possible to track its path across the ocean and Europe: Vancouver, Redmond, Moscow, the Russian customs in Moscow, the shipment throughout the country and the end point. First, Canada Post, and then by Russian Post. All day I sat on pins and needles, and in the evening I ran after the buns to the post office. She came on March 26, i.e. on the way the parcel spent two weeks. Not bad, if we assume that it went through the whole of Europe and two countries on the North American continent.
I forgot to take a photo of the parcel, externally - just a cardboard box with dimensions 40x60x40cm, in which there is a trolley inside, surrounded by newsprint (collected from these papers a whole number of Canadian newspaper ads - nobody wants to buy a house in Vancouver for $ 400,000? :))

The cart itself is made of durable matte black plastic. The construction is not cast, but assembled from plates of different shapes and sizes, and they are connected either with strong glue, or welded using heat treatment - I did not understand. The carrier part of the platform is “two-storeyed” - a netbook is placed on the top plate, on the bottom there are attached: engines, Arduino board, charging contacts, all wires are laid and there is still a lot of free space left.
The back cover of the netbook leans against the “tower” of the trolley and is fixed in this position with the help of two sliding elements. Elements are fixed and keep the netbook from falling. Slightly higher on the "tower" is installed servo, driving the construction of mirrors. Here the idea is what it is - initially there is no way to control the tilt of the netbook's camera, so a periscopic system of two mirrors was invented, which is set at such a height that the lower mirror is located exactly opposite the camera. This whole structure is hanging on the servomotor, rotating it up and down, changing the angle of view of the operator. Simple and convenient.
Xaxxon has several trolley accessories available, among them
- an additional LED flashlight for the trolley, hanged on the left side of the "tower", turned on separately via usb;
- mount for the sensor Asus Xtion (analogue Kinect).
I did not buy them, so I can’t show it on the photo. All information is on the Xaxxon website.
The cart uses its own modification of the Arduino Duemilanove on the ATmega328 with the H-Bridge circuit already divorced on the board. The board receives power from the netbook via usb (yes, the cart does not have its own battery for the engines), powered by the same engines and periscope servomotor. For engines, pins 2, 3, 4, 7, 8, 11 are used, they are not even brought out (except for 11 pins). You can use 4 PWM-pins 5, 9, 10, 11, two analog outputs 12 and 13, as well as standard RX, TX, 5V, GND, RST. For small dodelok more than enough.

Two motors, they are connected through a reducer to two wheels, while the wheels are NOT steering. Taxiing is performed by turning on the opposite rotation on the wheels (or by changing the rotational speed while driving), and the rear wheels are designed to facilitate the rotation itself.


Alas, I don’t have a netbook at home, so I had to drive a cart from my working laptop by connecting it through a long usb cord. The resistance of the long cable does its job and the trolley does not move very quickly, but surely, even on a very soft carpet.
The trolley is controlled by software written in Java. All software, as well as firmware for Arduinoculus, is available for download on code.google.com. It is stated that it works under both Windows and Linux, and there is no need to install any additional components (except for the Java VM itself). I’ll say right away that I didn’t succeed in running it on Windows Ultimate x64 (I'm a noob in Java), something is connected to the Java virtual machine on the x64 platform itself - the batch file started, it seems that something worked there, but no response from scripts. On x86 it started without problems. The software clings to the local port 5080 on the netbook, in the same place you can configure passwords for access, external ip-address and port for connecting clients, specify the camera and calibrate the hardware parameters. After launching the batch file, the browser page automatically opens, where you can configure all these parameters. If it does not open, then something is wrong.
The main control is available from another form.
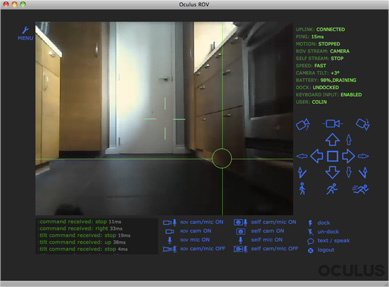
I think everything is obvious. To be honest, I didn’t dig in the standard software for a long time, immediately changed the board to the modified Firmata firmware and used it for my own developments, so I can’t tell you in detail what and how, but this is on the video on YouTube.
Standard firmware is very simple, there are about a dozen commands to control the board, you can easily extend the standard software by writing new modules.
The dock for charging the netbook battery is attached to the cart.

Charging scheme is simple - the side of the docking station stuck the wire from the charger of your netbook. When the cart approaches the docking station, the front with two contacts touches two plates at the bottom of the cart. From these contacts, another extension cord goes inside the cart and connects to the charging connector of the netbook. It is also easy and works fine. Although, of course, can oxidize quickly, so you need to follow the contacts.
Standard software is able to recognize a picture with an eye on the docking station and automatically approach it closely to ensure tight contact. Well, there is a function un-dock - the cart just gives back half a meter.
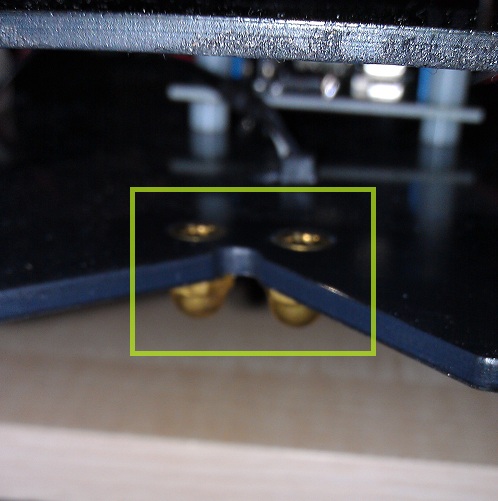
In the photo - contacts for the docking station.
Summing up - a worthy candidate for entertainment for interested engineers at a not very high price. The developers have tried, leaving room for work with the Arduinoculus board, and the cart itself is made very simply and securely, there is practically nothing to break down.
PS Please do not hit hard for the quality of the photo and the style of writing :)
Carefully, under the cut pictures.
In short, I will repeat what this device is. According to the idea of the developer, a certain construction with wheels is taken on which a netbook is placed. A netbook via usb-wire connects to the microcontroller of the trolley and allows you to control it from any program that knows how to work with Arduino (which is the main feature of this idea). The cart is remotely controlled by the operator, either from a stationary computer or through an Android application. When working using the built-in camera netbook.
')
It began with the order of the cart itself. The fact is that the company producing these devices is located in Canada, Vancouver, so the delivery of the package from there is a long-playing matter in itself. First I had to register on xaxxon.com and place an order. The cost of the trolley at the time of the order (and at the time of writing this article) was $ 269.99, and the cost of delivery to Russia - another $ 85.32
After ordering, Colin Adamson contacted me to clarify order details and payment. Payment is possible in two versions - by credit card through the company's website, or through PayPal (Colin issued a direct link to his company's page in PayPal).
After payment, I had to wait about a month and a half while they were collecting a new batch. The guys collaborate with some factories in Canada, where they produce cases and carts for the trolley. And so, on March 11 (after a long wait, however, it was replenished by the process of writing software under the cart), a letter arrived in the mail informing me that the order had been sent! Poor Colin, during these one and a half months I tortured him with questions about many moments in the board, its firmware, etc.
Fortunately, the letter contained the tracking number of the parcel, and it was possible to track its path across the ocean and Europe: Vancouver, Redmond, Moscow, the Russian customs in Moscow, the shipment throughout the country and the end point. First, Canada Post, and then by Russian Post. All day I sat on pins and needles, and in the evening I ran after the buns to the post office. She came on March 26, i.e. on the way the parcel spent two weeks. Not bad, if we assume that it went through the whole of Europe and two countries on the North American continent.
I forgot to take a photo of the parcel, externally - just a cardboard box with dimensions 40x60x40cm, in which there is a trolley inside, surrounded by newsprint (collected from these papers a whole number of Canadian newspaper ads - nobody wants to buy a house in Vancouver for $ 400,000? :))
The cart itself is made of durable matte black plastic. The construction is not cast, but assembled from plates of different shapes and sizes, and they are connected either with strong glue, or welded using heat treatment - I did not understand. The carrier part of the platform is “two-storeyed” - a netbook is placed on the top plate, on the bottom there are attached: engines, Arduino board, charging contacts, all wires are laid and there is still a lot of free space left.
The back cover of the netbook leans against the “tower” of the trolley and is fixed in this position with the help of two sliding elements. Elements are fixed and keep the netbook from falling. Slightly higher on the "tower" is installed servo, driving the construction of mirrors. Here the idea is what it is - initially there is no way to control the tilt of the netbook's camera, so a periscopic system of two mirrors was invented, which is set at such a height that the lower mirror is located exactly opposite the camera. This whole structure is hanging on the servomotor, rotating it up and down, changing the angle of view of the operator. Simple and convenient.
Xaxxon has several trolley accessories available, among them
- an additional LED flashlight for the trolley, hanged on the left side of the "tower", turned on separately via usb;
- mount for the sensor Asus Xtion (analogue Kinect).
I did not buy them, so I can’t show it on the photo. All information is on the Xaxxon website.
The cart uses its own modification of the Arduino Duemilanove on the ATmega328 with the H-Bridge circuit already divorced on the board. The board receives power from the netbook via usb (yes, the cart does not have its own battery for the engines), powered by the same engines and periscope servomotor. For engines, pins 2, 3, 4, 7, 8, 11 are used, they are not even brought out (except for 11 pins). You can use 4 PWM-pins 5, 9, 10, 11, two analog outputs 12 and 13, as well as standard RX, TX, 5V, GND, RST. For small dodelok more than enough.
Two motors, they are connected through a reducer to two wheels, while the wheels are NOT steering. Taxiing is performed by turning on the opposite rotation on the wheels (or by changing the rotational speed while driving), and the rear wheels are designed to facilitate the rotation itself.
Alas, I don’t have a netbook at home, so I had to drive a cart from my working laptop by connecting it through a long usb cord. The resistance of the long cable does its job and the trolley does not move very quickly, but surely, even on a very soft carpet.
The trolley is controlled by software written in Java. All software, as well as firmware for Arduinoculus, is available for download on code.google.com. It is stated that it works under both Windows and Linux, and there is no need to install any additional components (except for the Java VM itself). I’ll say right away that I didn’t succeed in running it on Windows Ultimate x64 (I'm a noob in Java), something is connected to the Java virtual machine on the x64 platform itself - the batch file started, it seems that something worked there, but no response from scripts. On x86 it started without problems. The software clings to the local port 5080 on the netbook, in the same place you can configure passwords for access, external ip-address and port for connecting clients, specify the camera and calibrate the hardware parameters. After launching the batch file, the browser page automatically opens, where you can configure all these parameters. If it does not open, then something is wrong.
The main control is available from another form.
I think everything is obvious. To be honest, I didn’t dig in the standard software for a long time, immediately changed the board to the modified Firmata firmware and used it for my own developments, so I can’t tell you in detail what and how, but this is on the video on YouTube.
Standard firmware is very simple, there are about a dozen commands to control the board, you can easily extend the standard software by writing new modules.
The dock for charging the netbook battery is attached to the cart.
Charging scheme is simple - the side of the docking station stuck the wire from the charger of your netbook. When the cart approaches the docking station, the front with two contacts touches two plates at the bottom of the cart. From these contacts, another extension cord goes inside the cart and connects to the charging connector of the netbook. It is also easy and works fine. Although, of course, can oxidize quickly, so you need to follow the contacts.
Standard software is able to recognize a picture with an eye on the docking station and automatically approach it closely to ensure tight contact. Well, there is a function un-dock - the cart just gives back half a meter.
In the photo - contacts for the docking station.
Summing up - a worthy candidate for entertainment for interested engineers at a not very high price. The developers have tried, leaving room for work with the Arduinoculus board, and the cart itself is made very simply and securely, there is practically nothing to break down.
PS Please do not hit hard for the quality of the photo and the style of writing :)
Source: https://habr.com/ru/post/141470/
All Articles