Python-interface between the computer and the physical world

American engineer Richard Wardlow developed an interesting pyMCU microcontroller, which he positions as “a simple Python interface between a computer and the physical world”.
Unlike existing Python-microcontrollers, this board is intended not so much for autonomous work, but rather as “sense organs” permanently connected to a computer for a Python program. The controller is equipped with digital and analog connectors, so that you can connect to it a variety of devices and sensors. The easiest way to show the capabilities of the controller with examples.
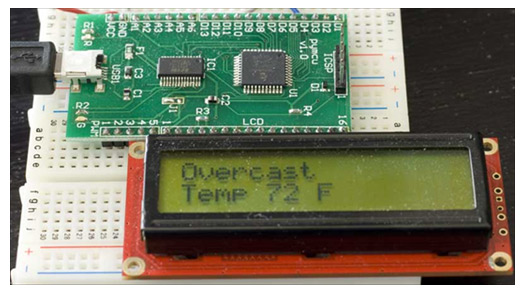
Conclusion to the LCD display of various data from the Internet
You can use any simple display to which the wires are connected. In this case, the current weather conditions and temperature are displayed.Python-Weather-API and the pywapi module.
')
Code
import pymcu import time import pywapi mb = pymcu.mcuModule() # Initialize mcu find first available module mb.lcd() # Initialize the LCD time.sleep(1) # Wait for LCD to Initialize google_result = pywapi.get_weather_from_google('10001') # Use Google as weather source with zip code 10001 mb.lcd(1,google_result['current_conditions']['condition']) # Display current conditions on first line of LCD time.sleep(0.1) # Small delay between next LCD command mb.lcd(2,'Temp ' + google_result['current_conditions']['temp_f'] + ' F') # Display Temperature on second line of LCD Plotting in real time according to the illumination data from the photosensor
Code
import os,sys, subprocess, time, shutil, glob import pymcu import numpy as np import matplotlib matplotlib.use('GTKAgg') # do this before importing pylab import matplotlib.pyplot as plt mb = pymcu.mcuModule() fig = plt.figure() ax = fig.add_subplot(111) ax.set_ylim(-1.1, 1.1) ax.set_xlim(0, 5) ax.grid() def animate(): tstart = time.time() # for profiling data = [0]*100 background = fig.canvas.copy_from_bbox(ax.bbox) for i in np.arange(1,1000): ax.clear() ax.grid() dt = float(mb.analogRead(4)) / 1024.0 data.append(dt) if len(data) > 100: data.pop(0) ax.plot(data) fig.canvas.draw() # redraw the canvas raise SystemExit import gobject print 'adding idle' gobject.idle_add(animate) print 'showing' plt.show() Camera lens control
Code
import pymcu import time fstops = {0:'0',0x8:'1',0xB:'1.1',0xC:'1.2',0xD:'1.2',0x10:'1.4',0x13:'1.6', \ 0x14:'1.8',0x15:'1.8',0x18:'2',0x1B:'2.2',0x1C:'2.5',0x1D:'2.5',0x20:'2.8', \ 23:'3.2',0x24:'3.2',0x25:'3.5',0x28:'4',0x2B:'4.5',0x2C:'4.5',0x2D:'5', \ 0x30:'5.6',0x33:'6.3',0x34:'6.7',0x35:'7.1',0x38:'8',0x3B:'9',0x3C:'9.5', \ 0x3D:'10',0x40:'11',0x43:'13',0x44:'13',0x45:'14',0x48:'16',0x4B:'18', \ 0x4C:'19',0x4D:'20',0x4E:'20',0x4F:'20',0x50:'22',0x53:'25',0x54:'27', \ 0x55:'29',0x58:'32',0x5A:'32',0x5B:'36',0x5C:'38',0x5D:'40',0x60:'45', \ 0x63:'51',0x64:'54',0x65:'57',0x68:'64',0x6B:'72',0x6C:'76',0x6D:'80',0x70:'91'} mb = pymcu.mcuModule() mb.lcd() print "Enable SPI" mb.spiEnable(1,100,0,0) # Init Lens lcheck = 0 while lcheck != 170: il = mb.spiTransfer([0,0xA,0,0xA,0], 400) lcheck = il[4] focalMin = 0 focalMax = 0 print "Init Lens" mb.lcd(1,'Init Lens ') il = mb.spiTransfer([0,0xA,0,0xA,0,0,0,0x80,0xA,0x98,1,0,0,0,0,0,0xB0,0,0,0,0xB0,0,0,0], 400) focalMin = (il[10] << 8) | il[11] focalMax = (il[12] << 8) | il[13] print "Focal", str(focalMin) + '-' + str(focalMax) print "F-Stop", str(fstops[int(il[21])]) + '-' + str(fstops[int(il[23])]) mb.lcd(1,'Focal ' + str(focalMin) + '-' + str(focalMax)) mb.lcd(2,'FStop ' + str(fstops[int(il[21])]) + '-' + fstops[int(il[23])]) time.sleep(2) # Wait and give some time to read the LCD mb.lcd() # Clear F-Stop (Full Open) print "Clear F-Stop" mb.lcd(1,'Clear F-Stop ') mb.spiTransfer([0x90,0,0,0,0xC,0x13,0x80,0x90,0,0,0xF,0xA,0],300) time.sleep(0.5) # F-Stop Full Close print "F-Stop Full Close" mb.lcd(1,'F-Stop Close ') mb.spiTransfer([0x13,0x58,0]) time.sleep(0.5) # Clear F-Stop (Full Open) print "Clear F-Stop" mb.lcd(1,'Clear F-Stop ') mb.spiTransfer([0x90,0,0,0,0xC,0x13,0x80,0x90,0,0,0xF,0xA,0],300) time.sleep(0.5) # Focus Test Far focusAmt = 100 print "Focus Test Far" mb.lcd(1,'Focus Test Far ') for x in range(20): mb.spiTransfer([0xA]) time.sleep(0.02) mb.spiTransfer([0x50,0x2F,0xE0,0,0,0xEA,0,0,0,0,0,0,0x44,0,focusAmt],300) time.sleep(0.02) mb.spiTransfer([0x90,0]) time.sleep(0.02) mb.spiTransfer([0xE,0]) time.sleep(0.1) # Focus Test Near focusAmt = 155 print "Focus Test Near" mb.lcd(1,'Focus Test Near ') for x in range(20): mb.spiTransfer([0xA]) time.sleep(0.02) mb.spiTransfer([0x50,0x2F,0xE0,0,0,0xE8,0,0,0,0,0,0,0x44,0xFF,focusAmt],300) time.sleep(0.02) mb.spiTransfer([0x90,0]) time.sleep(0.02) mb.spiTransfer([0xE,0]) time.sleep(0.1) mb.lcd(1,'Test Complete ') Source: https://habr.com/ru/post/139132/
All Articles