Harvard assembled "soft" robot
“Soft” of this robot can be called in the sense that it does not have a rigid body. We are all accustomed to the fact that robots, no matter whether it is industrial installations, or humanoid devices, have a hard body. The current robots for the most part represent a complex system that includes many hundreds, if not thousands, of details. But at Harvard University decided to go the other way, and created a device with an elastic body. The principle of operation of such a device is similar to the principle of movement of invertebrate organisms, for example, sea stars.
However, so far, experts from Harvard are working only on the principle of movement of the "robot", nothing else is being discussed. The advantages of “soft” robots can be stability, relative cheapness (plastic, which is used in construction, is inexpensive). Plus, such robots practically will not get damage when falling, and there is nothing to break into them - no bearings, hinges and other things.
')
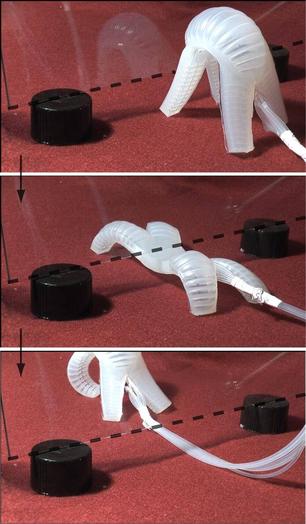
This robot uses compressed air and pressure changes in different parts of its “body” for movement. Inside the robot - a system of valves that allow you to create areas with different pressure. Under the influence of pressure, the plastic is deformed, and the “soft” robot moves. So far, scientists have proposed a project with four "limbs", but in the future there may be more. The robot is moving quite well, the scientists were able to even make it pass under the glass (preview photo).
Of course, in the full sense of the robot this plastic creation can hardly be called so far, but if you add all sorts of electronic components (miniature, so as not to interfere with the movement), and improve the compressed air supply, but you can achieve impressive results. The problem so far is precisely the need to supply compressed air to move the robot - it is unlikely that such a device can be called autonomous. But, probably, everything is solved, and after a while scientists will present a more advanced “robot”.
Via washingtonpost
Source: https://habr.com/ru/post/133614/
All Articles