Flight BeagleBoard at an altitude of 36 km!

Introduction
I am glad to inform you that BeagleBoard is able to work in extreme conditions with zero pressure and low temperatures, which occur at an altitude of 36 km. As part of the project, I sent BeagleBoard to the stratosphere to receive photos and send them in real time using a simple, small radio transmitter. In this post I am going to tell you about what and how it was done with the application of some images, scripts and other things used by me.
Project "Space Camera Live 1"
With this launch we managed to get a live broadcast from the stratosphere. We received the largest, highest, and fastest photographs that were ever sent from the stratosphere by amateurs using a 10 mW radio transmitter (as the consumption of a single LED). We had two payloads lifted using a helium balloon to a maximum altitude of almost 36 km. During the flight, images and information from the GPS premnik were transmitted and received from the probe in real time. Anyone had the opportunity to take this information and immediately publish it for all to see.
All scripts, PCB, etc. are available on the project page.
Flight statistics
- Price - € 150 (cost of helium and balloon)
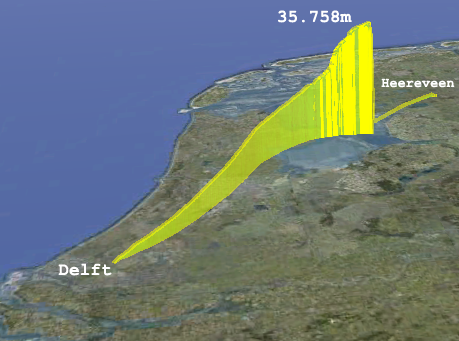
- Launch - 12:36 (11-09-2011 Delft Netherlands)
- Landing - 15:00 (11-09-2011 Heereveen Friesland)
- The ball burst at 14:26
- Found at 15:55
- Flight duration 2 h. 24 min.
- Max. flight altitude 35,748 meters
- Total weight ~ 1300 gr.
- Main payload - Beagleboard / GPS / GPRS / Webcam / Radio
- Additional payload - Arduino / GPS / GPRS / Cutdown (Packing Data, approx. Transl.)
- Data compression - in real time
- Total received 1731 photos
- Of these, sent in real time 123 photos
- Total 119 photos received in real time
- 6 million bits received in real time
- Max. data transfer rate of 1,200 bps.
- The largest image sent in real time is 800x592 px
- Traveled path (3D) - 205 km.
- The minimum temperature inside the probe + 5 ° C
- Radio transmitter power 10mW (434.653MHz, 8n2)
')
Video
Images





1700 photos taken, 123 sent
Sending one photo took from 10 to 60 seconds. While one photo was sent the webcam managed to take a few pictures. Which one to send next? Last? Not. It was logical to send the best shot. Therefore, I have compiled an algorithm that chose the best image according to two criteria: 1) the average value in grayscale and 2) 8-bit standard deviation from 30 ideal images (see Algorithm of choosing a high-quality image ).
Below is the data from the additional unit (Ardruino)
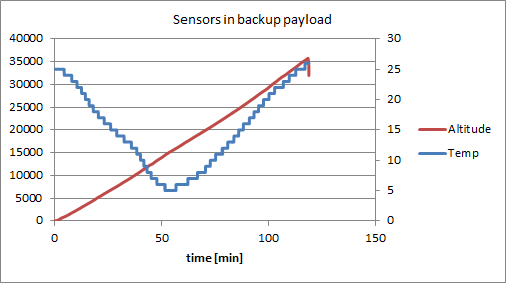
According to the sensors, it can be said that at a really low temperature, the modules were not for long. The minimum temperature inside the main (thermally insulated) module with BeagleBoard was + 5 ° C. At this temperature (judging by the graphs below), BeagleBoard worked only 5-10 minutes.
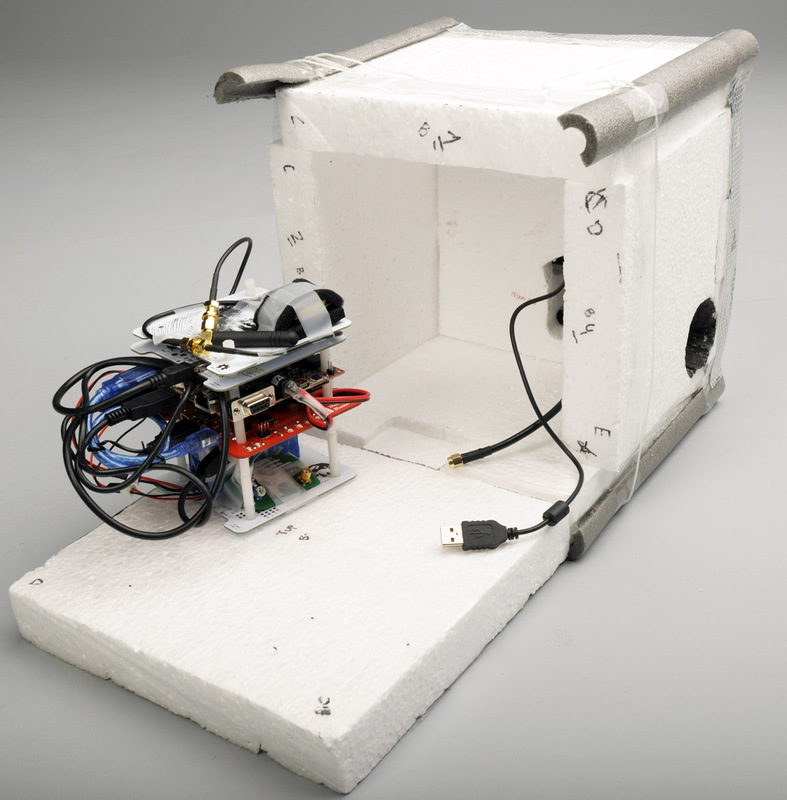
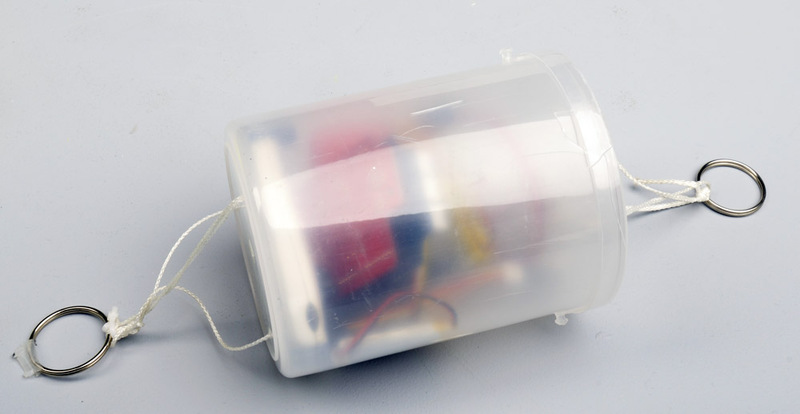
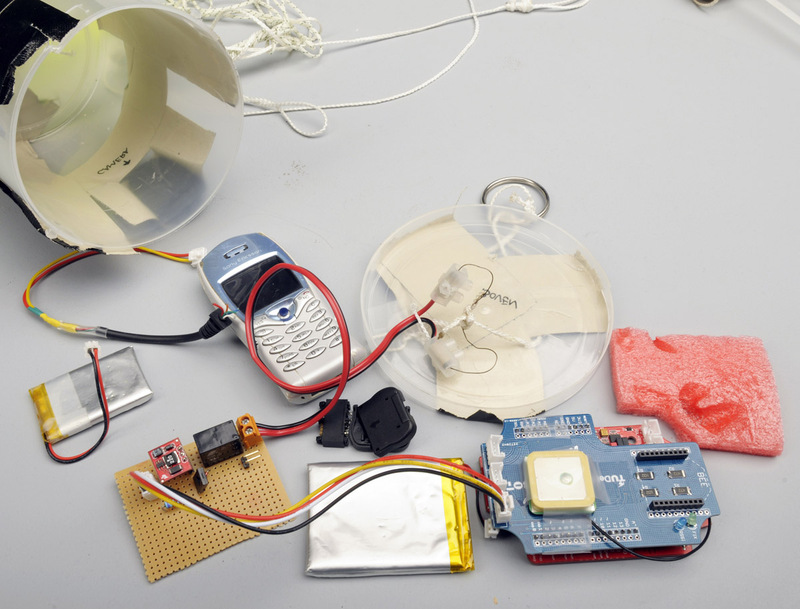
Beagleboard and additional parts
To power the BeagleBoard, I manufactured the Beagle Battery module. How I did it can read here ( not translated yet, approx. Transl. ).
A GPS / GPRS module was also made, which you can read about here ( not translated yet, approx. Transl. ).
Used components
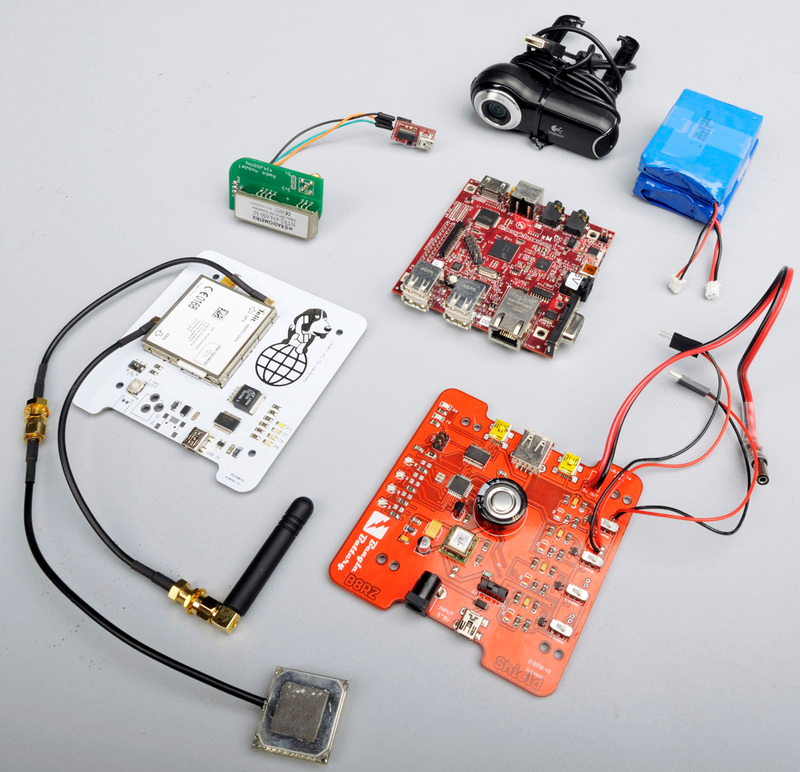
The appearance of the ball, the main and additional modules
From translator
Immediately must write that the translation is free. Please do not kick the grammarnats.
Further ... In the section “1700 photos taken, 123 sent” added from myself about how much BeagleBoard was at a low temperature. In fact, the duration is also small and the temperature is too high to judge the vitality of the beagle. In addition, BeagleBoard, as far as I know, comes in a version with a commercial temperature range (from 0 to +70 degrees Celsius). Are there analogs of BeagleBoard in industrial design with a temperature range from -40 to +70 degrees, which can be supplied to Russia, I don’t know for sure yet. There are processor modules (for example, "Mini 8100 PC"), built on the same processor platform. But this is not the same thing. It is difficult to work with the bare “on the knee” module (you need to fit the connectors yourself). Specially recognized in “terraelectronica” the possibility of supplying processor modules to the TI OMAP3530 in Russia. Modules MINI 8100 PC promised to deliver in 5-6 months. The long term is explained by the fact that TI has been completing orders for products in industrial design for a very long time.
So, I conclude that the project used a board with a temperature range from 0 to +70 degrees. Therefore, proper operation at sub-zero temperatures is not guaranteed. If the probe was delayed at an altitude of about 15 km. long enough, and inside the main module the temperature would fall below zero Celsius, then with high probability BeagleBoard would fail.
And at the end of the links to related posts. There are two more (or rather even three) related articles: descriptions of autonomous power supply modules (prototype and production version), as well as a description of the GPS / GPRS module. It is also quite voluminous materials. If there is interest from readers and an opportunity for me, I will also translate them.
THANKS FOR ATTENTION! Your comments ...
Links
Algorithm of the choice of a qualitative picture
Making a proper antenna.
Making a 'hot-wire' cutdown mechanism.
Cutting your styrofoam.
[BeagleBoard] Beagle Battery Prototype
[BeagleBoard] Beagle Battery Module in Production
[Linux] Beagleboard GPS SMS Cellphone Module ready!
Scripts can be downloaded on the original page.
Source: https://habr.com/ru/post/133545/
All Articles