ASUDD: Evolution of "smart" traffic lights
Last time, in the article “ ASUDD: What hangs over the road? ” We briefly walked through the “hardware”, which is installed on transport routes: according to the types of traffic flow detectors, LED boards and road controllers.
Today we will continue to talk about traffic management, but already in the city. Let's consider what the traffic light regulation cycle consists of, what exactly the control systems "rule" and how it all, in fact, began.
I didn’t dare to start writing this post for a long time, because the topic of traffic management on city streets is so voluminous and versatile that, arguing about it, you constantly risk to appear in the role of a “lamer” in related areas. But I still risk and try.
')
In order to understand what exactly the control algorithms “drive”, it is necessary to know five basic definitions of traffic light regulation.
We open the textbook “Technical Means of Traffic Management” by Mr. Kremenets and read the definitions (American equivalents of terms are shown in brackets):
Here is a picture that illustrates well the notion of a cycle, a phase and an interval:

Now open the American book " Traffic Control Systems Handbook ". Americans add two more definitions that are key to automating the regulatory process:
Regulation section (Split). The percentage of control cycle allocated to each of the control phases.
Roughly speaking, by varying the percentage of time per phase, you can control the duration of the green signal in the most loaded direction. At a freestanding intersection, this reduces delays.
Offset. The difference (in seconds or percentage of the regulation cycle) between the clocks at a particular intersection and the master clocks (at the intersection network).
Since the term sounds a bit abstruse, here is a picture that illustrates it very well.
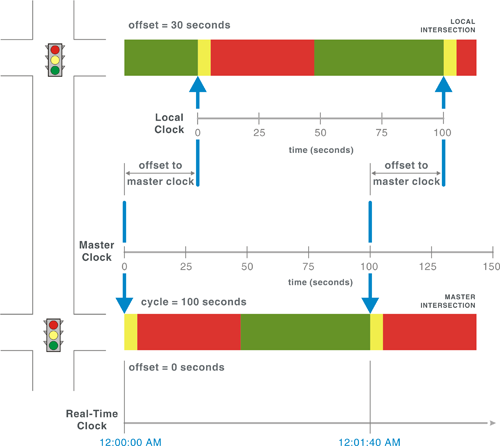
It is seen that the phases at the next intersection are shifted relative to the previous one. Time offset is just enough for a group of cars had time to drive up to him and slip on the green. The calculation is usually performed for some average speed adopted in this region. Therefore, “racers” and “brakes” usually break off on such highways.
Here you can read about everything mentioned in detail. From there, and the last picture.
It is interesting to consider the main types of “smart” traffic lights in a historical perspective, since they did not appear immediately and evolved from simple to complex.
Car traffic lights came to us from the railway. The first electric hand-held traffic light in the United States was installed in Cleveland in 1914. Three years later, in 1917, a system was constructed in Salt Lake City that controls traffic lights at six intersections at once. The role of the road controller performed by the traffic controller. In 1922, in Houston, they did the same, but at twelve intersections. Management was conducted in the manual mode from a special tower.
The concept of automatic traffic lights was proposed in 1928. Any electrician could install and configure it and everyone began to buy and install such traffic lights. But problems immediately arose in large cities, where there were morning and evening rush hours, during which it would be good to change plans for coordinating traffic lights so that traffic jams were not created. Problems of lack of personnel for this responsible business have come to its full height. Inquisitive American mind thought about the further improvement of road automation.
In the period from 1928 to 1930, the inventors proposed various designs of pressure detectors that determine the presence of cars at the intersection. This allowed us to make the first models of traffic lights that react to traffic (traffic-actuated). Such traffic lights had an effect on highways, where the red at the main course was switched on only if a car approached from the side of the secondary road. Such systems are still in the United States and do a good job at isolated intersections. Pedestrian call buttons work in a similar way, and when pressed, the pedestrian phase is built into the next control cycle.
In 1952, the first analog controller was installed in Denver, which made it possible to combine several disparate intersections into a single managed network and switch on pre-calculated coordination plans depending on the time of day and days of the week. In the following decade, several hundred of these systems were installed around the world.
Such systems actively used the displacement parameter, including the green one, not at all at all intersections, but with an offset depending on the distance between intersections and transport parameters (“green wave”). A specially trained engineer counted and drew on a piece of paper coordination schemes, which were then laid in the controllers. The system turned out to be so simple and reliable that it is still actively used in cities that are not burdened with excessive traffic.
In 1960, in Toronto, the first “real” computer was installed to control the traffic lights - a smart IBM 650 with drum memory for 2000 machine words. It was a huge breakthrough in traffic control technology! Three years later, more than 20 intersections were under centralized control, and by 1973 the computer was already driving 885 intersections!
Seeing such a clear success, IBM continued to work on the use of its computers in the management of traffic lights. In 1964, a project was launched in the center of San Jose with an IBM 1710 computer, and in 1965 an IBM 1800 was installed for the city of Wichita Falls (Texas) (an advanced version of the 1130 with an increased number of I / O ports), which successfully managed 85 intersections. The computer in San Jose was also subsequently replaced by the IBM 1800. The system was so successful that this configuration was used in many American cities from Austin and Portland to New York.
Here it is, the legendary IBM 1800 ( source image )

Work on the standardization of control systems for traffic lights started in 1967. As part of the pilot project, a control system was built for Washington, which included 113 intersections equipped with 512 transport detectors based on an inductive loop. The computer was able not only to blindly switch coordination plans, but also to receive information about transport queues at intersections (at that time they did not use Doppler radars to measure the flow velocity).
In short, the critical mass of traffic lights connected to computers was achieved, and the transition from quantity to quality was only a matter of time. Began large-scale research in the development of control algorithms.
The idea of having plans for coordination for all occasions was not bad in theory, but for all occasions, as it turned out, you cannot save plans. The development of each plan in the 70s was made on paper and was quite laborious and creative process. And if for a long street with traffic lights, like Leninsky Prospekt in Moscow, it was quite easy to calculate the algorithms, then it was a completely trivial task on the street network. There are more that there are many cities, and not all of them can afford to keep a competent transport engineer on staff.
And in the 1970s, the British research bureau TRRL (The Transport and Road Research Laboratory) developed and implemented the SCOOT system (Split, Cycle and Offset Optimization Technique) on the streets of Glasgow, which allowed “playing” the parameters of the traffic light regulation cycle within certain limits from information of transport detectors measuring the presence and length of queues at traffic lights. SCOOT combined the advantages of fixed coordination plans for the network and adaptive control, when the “smart” traffic light itself “steers” with the cycle and duration of the green signals. SCOOT in the 80s had a number of successful implementations in Europe and North America. Moreover, now this algorithm (already in the third generation) is licensed to more than 100 companies for use as part of their systems.
SCOOT in the third generation shows the wonders of sophisticated control: it can handle unusual situations, take away traffic jams, smooth out the consequences of interfering with traffic flow of traffic controllers and temporary traffic overlaps that people like to arrange so much in your own country.
Simultaneously with SCOOT, similar control systems began to appear like mushrooms after rain in the 70s and 80s. The Australian system SCATS (Sydney Coordinated Adaptive Traffic System) has become the main competitor of the British and has also been widely implemented throughout the world. Like SCOOT, SCATS refers to systems that are “sensitive” to traffic (traffic responsive).
Fully adaptive control algorithms (traffic adaptive), which were presented in the world of OPAC (Optimized Policies for Adaptive Control) and RHODES, developed by the University of Arizona, also developed.
Now the difference in management efficiency between adaptive and “sensitive” systems has practically faded. Like the Internet browser race, these “blunt-tips” and “little-tips” constantly conduct research to prove the effectiveness of their own algorithm, but reports from independent experts show that in general there is no particular difference.
But now, with the development and cheapening of computer equipment, there are opportunities to increase the survivability of control systems. Part of the control logic began to be stitched directly into road controllers, which, even if the connection with the center was broken, were not lost and began to unite into control clusters with neighboring controllers. In the conditions of geographically distributed control systems, the interruption of communication channels is a common thing, and such a bonus was not at all superfluous.
He was going to round off today and suddenly remembered that he had not mentioned a word of Russian (Soviet) experience. So, I would very much like us to be unique and ahead of the rest, but this is not so. Most of the domestic traffic management works on the roads are based on the translation of the American book of 1972. Unlike the defense industry, this area was not unique.
Work on the centralized computer control of traffic lights began in our country in the early 80s (that is, 20 years later than the Americans). On the instructions of the Moscow Government and the Ministry of Transport of the Russian Federation, a Start system was created in Defafe City, which was able to carry out coordinated control of traffic lights. In the control center, the server worked on the "diesel" with an Informix database. Technically, the system was top of excellence available to our specialists. More than 400 traffic light objects throughout the city were managed from a single center! But about any adaptive control of speech did not go. In fact, it was an analogue of systems that were introduced around the world in the 70s before the advent of adaptive algorithms. Then the well-known events struck, which in no way contributed to the development of domestic transport systems. And today we have in different cities a shaped zoo from fragments of Western management systems. But let's hope that with time the situation in this area will normalize and more interesting complex implementations will appear. There is nothing complicated about it. Really, colleagues?
On this I propose to complete the review of control algorithms and move on to transport simulation, which, in general, fills all this technique with meaning. I would like to tell you in the next publication about the use of transport models, their varieties and integration into the contour of traffic control systems.
References:
SCOOT
SCATS
Read at night
Today we will continue to talk about traffic management, but already in the city. Let's consider what the traffic light regulation cycle consists of, what exactly the control systems "rule" and how it all, in fact, began.
I didn’t dare to start writing this post for a long time, because the topic of traffic management on city streets is so voluminous and versatile that, arguing about it, you constantly risk to appear in the role of a “lamer” in related areas. But I still risk and try.
')
Red, yellow, green ...
In order to understand what exactly the control algorithms “drive”, it is necessary to know five basic definitions of traffic light regulation.
We open the textbook “Technical Means of Traffic Management” by Mr. Kremenets and read the definitions (American equivalents of terms are shown in brackets):
- Regulation cycle (Interval). The period of validity of a certain combination of traffic lights
- Regulation Phase (Signal Phase). The totality of the main and subsequent intermediate tact
- Regulation Cycle (Signal Cycle). Periodically repeating set of all phases
Here is a picture that illustrates well the notion of a cycle, a phase and an interval:
Now open the American book " Traffic Control Systems Handbook ". Americans add two more definitions that are key to automating the regulatory process:
Regulation section (Split). The percentage of control cycle allocated to each of the control phases.
Roughly speaking, by varying the percentage of time per phase, you can control the duration of the green signal in the most loaded direction. At a freestanding intersection, this reduces delays.
Offset. The difference (in seconds or percentage of the regulation cycle) between the clocks at a particular intersection and the master clocks (at the intersection network).
Since the term sounds a bit abstruse, here is a picture that illustrates it very well.
It is seen that the phases at the next intersection are shifted relative to the previous one. Time offset is just enough for a group of cars had time to drive up to him and slip on the green. The calculation is usually performed for some average speed adopted in this region. Therefore, “racers” and “brakes” usually break off on such highways.
Here you can read about everything mentioned in detail. From there, and the last picture.
How "smarter" traffic lights
It is interesting to consider the main types of “smart” traffic lights in a historical perspective, since they did not appear immediately and evolved from simple to complex.
Car traffic lights came to us from the railway. The first electric hand-held traffic light in the United States was installed in Cleveland in 1914. Three years later, in 1917, a system was constructed in Salt Lake City that controls traffic lights at six intersections at once. The role of the road controller performed by the traffic controller. In 1922, in Houston, they did the same, but at twelve intersections. Management was conducted in the manual mode from a special tower.
The concept of automatic traffic lights was proposed in 1928. Any electrician could install and configure it and everyone began to buy and install such traffic lights. But problems immediately arose in large cities, where there were morning and evening rush hours, during which it would be good to change plans for coordinating traffic lights so that traffic jams were not created. Problems of lack of personnel for this responsible business have come to its full height. Inquisitive American mind thought about the further improvement of road automation.
In the period from 1928 to 1930, the inventors proposed various designs of pressure detectors that determine the presence of cars at the intersection. This allowed us to make the first models of traffic lights that react to traffic (traffic-actuated). Such traffic lights had an effect on highways, where the red at the main course was switched on only if a car approached from the side of the secondary road. Such systems are still in the United States and do a good job at isolated intersections. Pedestrian call buttons work in a similar way, and when pressed, the pedestrian phase is built into the next control cycle.
In 1952, the first analog controller was installed in Denver, which made it possible to combine several disparate intersections into a single managed network and switch on pre-calculated coordination plans depending on the time of day and days of the week. In the following decade, several hundred of these systems were installed around the world.
Such systems actively used the displacement parameter, including the green one, not at all at all intersections, but with an offset depending on the distance between intersections and transport parameters (“green wave”). A specially trained engineer counted and drew on a piece of paper coordination schemes, which were then laid in the controllers. The system turned out to be so simple and reliable that it is still actively used in cities that are not burdened with excessive traffic.
In 1960, in Toronto, the first “real” computer was installed to control the traffic lights - a smart IBM 650 with drum memory for 2000 machine words. It was a huge breakthrough in traffic control technology! Three years later, more than 20 intersections were under centralized control, and by 1973 the computer was already driving 885 intersections!
Seeing such a clear success, IBM continued to work on the use of its computers in the management of traffic lights. In 1964, a project was launched in the center of San Jose with an IBM 1710 computer, and in 1965 an IBM 1800 was installed for the city of Wichita Falls (Texas) (an advanced version of the 1130 with an increased number of I / O ports), which successfully managed 85 intersections. The computer in San Jose was also subsequently replaced by the IBM 1800. The system was so successful that this configuration was used in many American cities from Austin and Portland to New York.
Here it is, the legendary IBM 1800 ( source image )
Work on the standardization of control systems for traffic lights started in 1967. As part of the pilot project, a control system was built for Washington, which included 113 intersections equipped with 512 transport detectors based on an inductive loop. The computer was able not only to blindly switch coordination plans, but also to receive information about transport queues at intersections (at that time they did not use Doppler radars to measure the flow velocity).
In short, the critical mass of traffic lights connected to computers was achieved, and the transition from quantity to quality was only a matter of time. Began large-scale research in the development of control algorithms.
The idea of having plans for coordination for all occasions was not bad in theory, but for all occasions, as it turned out, you cannot save plans. The development of each plan in the 70s was made on paper and was quite laborious and creative process. And if for a long street with traffic lights, like Leninsky Prospekt in Moscow, it was quite easy to calculate the algorithms, then it was a completely trivial task on the street network. There are more that there are many cities, and not all of them can afford to keep a competent transport engineer on staff.
And in the 1970s, the British research bureau TRRL (The Transport and Road Research Laboratory) developed and implemented the SCOOT system (Split, Cycle and Offset Optimization Technique) on the streets of Glasgow, which allowed “playing” the parameters of the traffic light regulation cycle within certain limits from information of transport detectors measuring the presence and length of queues at traffic lights. SCOOT combined the advantages of fixed coordination plans for the network and adaptive control, when the “smart” traffic light itself “steers” with the cycle and duration of the green signals. SCOOT in the 80s had a number of successful implementations in Europe and North America. Moreover, now this algorithm (already in the third generation) is licensed to more than 100 companies for use as part of their systems.
SCOOT in the third generation shows the wonders of sophisticated control: it can handle unusual situations, take away traffic jams, smooth out the consequences of interfering with traffic flow of traffic controllers and temporary traffic overlaps that people like to arrange so much in your own country.
Simultaneously with SCOOT, similar control systems began to appear like mushrooms after rain in the 70s and 80s. The Australian system SCATS (Sydney Coordinated Adaptive Traffic System) has become the main competitor of the British and has also been widely implemented throughout the world. Like SCOOT, SCATS refers to systems that are “sensitive” to traffic (traffic responsive).
Fully adaptive control algorithms (traffic adaptive), which were presented in the world of OPAC (Optimized Policies for Adaptive Control) and RHODES, developed by the University of Arizona, also developed.
Now the difference in management efficiency between adaptive and “sensitive” systems has practically faded. Like the Internet browser race, these “blunt-tips” and “little-tips” constantly conduct research to prove the effectiveness of their own algorithm, but reports from independent experts show that in general there is no particular difference.
But now, with the development and cheapening of computer equipment, there are opportunities to increase the survivability of control systems. Part of the control logic began to be stitched directly into road controllers, which, even if the connection with the center was broken, were not lost and began to unite into control clusters with neighboring controllers. In the conditions of geographically distributed control systems, the interruption of communication channels is a common thing, and such a bonus was not at all superfluous.
And what about Russia?
He was going to round off today and suddenly remembered that he had not mentioned a word of Russian (Soviet) experience. So, I would very much like us to be unique and ahead of the rest, but this is not so. Most of the domestic traffic management works on the roads are based on the translation of the American book of 1972. Unlike the defense industry, this area was not unique.
Work on the centralized computer control of traffic lights began in our country in the early 80s (that is, 20 years later than the Americans). On the instructions of the Moscow Government and the Ministry of Transport of the Russian Federation, a Start system was created in Defafe City, which was able to carry out coordinated control of traffic lights. In the control center, the server worked on the "diesel" with an Informix database. Technically, the system was top of excellence available to our specialists. More than 400 traffic light objects throughout the city were managed from a single center! But about any adaptive control of speech did not go. In fact, it was an analogue of systems that were introduced around the world in the 70s before the advent of adaptive algorithms. Then the well-known events struck, which in no way contributed to the development of domestic transport systems. And today we have in different cities a shaped zoo from fragments of Western management systems. But let's hope that with time the situation in this area will normalize and more interesting complex implementations will appear. There is nothing complicated about it. Really, colleagues?
On this I propose to complete the review of control algorithms and move on to transport simulation, which, in general, fills all this technique with meaning. I would like to tell you in the next publication about the use of transport models, their varieties and integration into the contour of traffic control systems.
References:
SCOOT
SCATS
Read at night
Source: https://habr.com/ru/post/125282/
All Articles