Developers from MIT have adapted a quadrocopter to get a model room
A team of craftsmen from the Massachusetts Institute of Technology has adapted a quadrocopter to fly around the room in order to create a 3D model of the room with all the small and large details. By the way, X Box Kinect is used in this scheme (and where is it not used now?). It is also interesting that all the necessary operations for calculating the model parameters are carried out directly on board the quadcopter. Simulation is carried out in real time.
The most interesting thing is that this system was not created by venerable scientists, but, as usual, by students. The system is based on recent university achievements in the field of visual odometry (measurement of distance traveled). Now all the achievements have been used to create this scheme.
')
It is also worth noting that the system does not use GPS - quadcopters are “investigating” everything by their own experience, creating a model of a room and then working on the basis of the data obtained. It is also interesting that the scheme does not provide for the use of external sensors, the system receives all data independently, based on visual data.
The guys from MIT also used data from the developers of Washington University, or rather, some algorithms developed to build accurate models of the surrounding space.
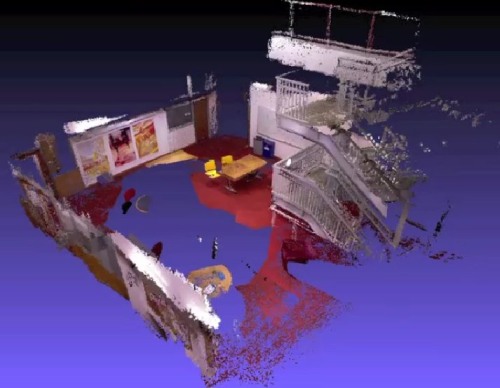
The results of the work can be seen below:
Via mit
Source: https://habr.com/ru/post/116792/
All Articles