The virtual model of the nematode C. elegans
In this article I would like to tell you about our project.
The project is dedicated to the creation of a functioning three-dimensional computer model of C. Elegans nematodes, that is, a model that includes sensory, nervous and muscular systems that interact with each other and are viewed in a physical environment. The fundamental problem that the project aims to solve is to find out whether it is possible to reproduce the behavior of a virtual organism, close to the original, on the basis of modern models of a biological neuron. C.Elegans (free-living nematode) was taken as a model organism, as mentioned above. Our choice fell on this nematode, not just like that, C. Elegans is the most studied multicellular organism, today there is data not only about all neurons, but also about the connections between them (302 neurons, more than 5000 synapses, more than 2000 neuromuscular connections and 95 muscle cells that perform movement, the whole body consists of 959 cells). In this regard, the C. Elegans nematode is not just one of the possible objects of research, but the key to the problem of intelligence, because it has a number of unique properties - the invariance of the nervous system, which simplifies the task of observing the states of neurons in a living organism; and a rather complex spectrum of behavioral reactions with relative simplicity of the nervous system. Creating a fully functional virtual copy of C. Elegans will lay the foundation for studying the nervous system of much more complex creatures, as well as significantly expand the design capabilities of artificial neural networks using the identified mechanisms and patterns inherent in biological neural networks, which is of exceptional interest to both neurobiology and for areas of knowledge related and artificial intelligence.
Currently achieved the following results. A simulator of the muscular system and the environment in which the model operates is made. It is based on a physical model built in the form of a system of connected point masses and springs; the latter can be reduced by the action of nerve impulse signals sent by them from motor neurons in proportion to the signal intensity. The system of differential equations describing the model is solved numerically at each step, taking into account gravity, friction, support reaction from the surface, etc. The model uses experimental data on the coordinates of neurons and the connections between them; The coordinates of the neurons are dynamically linked to the spring-muscular framework of C. Elegans. Within this model, we can record for each point the moment of contact of the surface and send a signal to the corresponding tactile sensation cell detectors, and in the case of activation of motor neurons, reduce these or other muscles. At the moment, a neural network of motoneurons (motor circuit), which control the behavior of the body's muscular system, has been made; this neural network will become a subnetwork of a larger network, covering all the neurons of C. Elegans. At the moment we are implementing a neural network that completely repeats the neural network of a live worm.
All model is implemented in C ++. Visualization is done using OpenGl.
')
Multi-colored inscriptions mark the names of neurons.
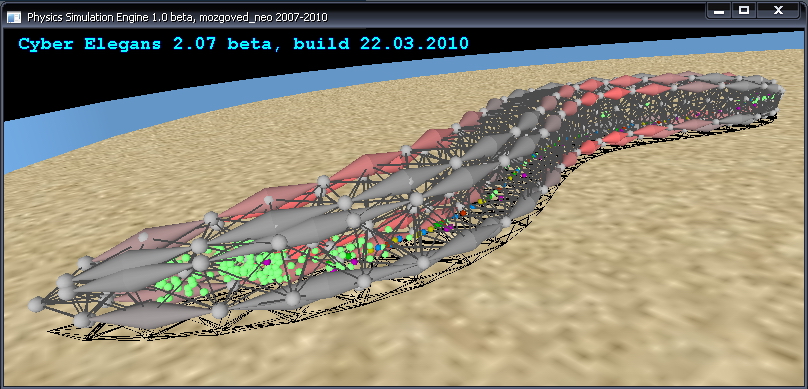
In the picture, colored spheres represent neurons.
The project is being implemented at the Laboratory for Modeling Complex Systems , the Institute of Informatics Systems named after AP Ershov of the Siberian Branch of the Russian Academy of Sciences. The project is carried out by a team of three people, Andrei Yuryevich Palyanov, the immediate project manager and part-time my supervisor, me and Alexander Dybert.
TASK
The project is dedicated to the creation of a functioning three-dimensional computer model of C. Elegans nematodes, that is, a model that includes sensory, nervous and muscular systems that interact with each other and are viewed in a physical environment. The fundamental problem that the project aims to solve is to find out whether it is possible to reproduce the behavior of a virtual organism, close to the original, on the basis of modern models of a biological neuron. C.Elegans (free-living nematode) was taken as a model organism, as mentioned above. Our choice fell on this nematode, not just like that, C. Elegans is the most studied multicellular organism, today there is data not only about all neurons, but also about the connections between them (302 neurons, more than 5000 synapses, more than 2000 neuromuscular connections and 95 muscle cells that perform movement, the whole body consists of 959 cells). In this regard, the C. Elegans nematode is not just one of the possible objects of research, but the key to the problem of intelligence, because it has a number of unique properties - the invariance of the nervous system, which simplifies the task of observing the states of neurons in a living organism; and a rather complex spectrum of behavioral reactions with relative simplicity of the nervous system. Creating a fully functional virtual copy of C. Elegans will lay the foundation for studying the nervous system of much more complex creatures, as well as significantly expand the design capabilities of artificial neural networks using the identified mechanisms and patterns inherent in biological neural networks, which is of exceptional interest to both neurobiology and for areas of knowledge related and artificial intelligence.
WHAT IS DONE
Currently achieved the following results. A simulator of the muscular system and the environment in which the model operates is made. It is based on a physical model built in the form of a system of connected point masses and springs; the latter can be reduced by the action of nerve impulse signals sent by them from motor neurons in proportion to the signal intensity. The system of differential equations describing the model is solved numerically at each step, taking into account gravity, friction, support reaction from the surface, etc. The model uses experimental data on the coordinates of neurons and the connections between them; The coordinates of the neurons are dynamically linked to the spring-muscular framework of C. Elegans. Within this model, we can record for each point the moment of contact of the surface and send a signal to the corresponding tactile sensation cell detectors, and in the case of activation of motor neurons, reduce these or other muscles. At the moment, a neural network of motoneurons (motor circuit), which control the behavior of the body's muscular system, has been made; this neural network will become a subnetwork of a larger network, covering all the neurons of C. Elegans. At the moment we are implementing a neural network that completely repeats the neural network of a live worm.
All model is implemented in C ++. Visualization is done using OpenGl.
')
Multi-colored inscriptions mark the names of neurons.
In the picture, colored spheres represent neurons.
The project is being implemented at the Laboratory for Modeling Complex Systems , the Institute of Informatics Systems named after AP Ershov of the Siberian Branch of the Russian Academy of Sciences. The project is carried out by a team of three people, Andrei Yuryevich Palyanov, the immediate project manager and part-time my supervisor, me and Alexander Dybert.
Source: https://habr.com/ru/post/104252/
All Articles