Report from the Moscow demonstration of the VisLab Intercontinental Autonomous Challenge or Italian automatic wonder-machines in action
The topic of electric transport has already ceased to be new for the IT community. Although the electric car on Russian roads is still a wonder, but some habra people already collect electric bikes with their own hands. This report is about electric vehicles, but the main highlight is not the point. The fact is that the Italian company VisLab some time ago began to implement a grand event - a transcontinental rally on automatically controlled electric vehicles that can move almost without human intervention and without using traditional fuel. From 17 to 19 August, the Italian delegation was in Moscow, on 18 August, a demonstration was held near the Cosmos Hotel, and yesterday, 19 August - a demonstration for the Moscow office of Topcon Positioning Systems , which is a partner of the run and supplied its navigation equipment for it. I was lucky to get to this demonstration.  First of all, I want to disappoint those who watched the movie “I, the Robot” and were flattered by the picture above. No super-fast supercars without a steering wheel, everything is much more modest. The usual Italian "microcar" electric powered Piaggio Porter , pasted labels and tied with wires. Looking ahead - fully automatic control in VisLab is also not yet achieved. But still the cars are very interesting and VisLab had something to show.
First of all, I want to disappoint those who watched the movie “I, the Robot” and were flattered by the picture above. No super-fast supercars without a steering wheel, everything is much more modest. The usual Italian "microcar" electric powered Piaggio Porter , pasted labels and tied with wires. Looking ahead - fully automatic control in VisLab is also not yet achieved. But still the cars are very interesting and VisLab had something to show.

Handsome, right?

Front view, "trailer" hung with sensors and equipment. Below is a description of everything that is installed additionally outside and inside.

On the roof in front, above the windshield, are placed front cameras that form a stereoscopic image (right and left), a stereo image of about 80 cm. The road surface roughness, road marking and possible slope are tracked by the stereoscopic image when driving on good roads. In the center, between the cameras, with an inclination downward, there is an off-road laser scanner ; it relies on automatic equipment when driving onroads in Russian places where there are no roads. It performs a task similar to stereo cameras, but is more focused on finding irregularities. Also under the glass you can see the system for obtaining a panoramic image - three cameras, the picture from which is “glued” together in a computer, you get a front view with a field of view 180 degrees horizontally. In this picture, the position of the “leading” car is tracked, even if there is a bias or sharp turn ahead.

Three more laser scanners are installed on the front bumper. Of them:

Almost the entire roof is occupied by the solar battery , from which the entire automatic control system is powered. It has nothing to do with standard batteries and electric motor. It was done this way, because VisLab wanted to make minimal changes to the standard electric vehicle systems. For bad weather and night driving, the control system has its own backup batteries. Another interesting thing on the roof:

Terribly useful device with the emblem Topcon Positioning Systems, includes:

The device in the brown case without inscriptions was installed only on one of the machines, according to some data it is a Thales navigation system , similar in functionality to the above-described Topcon.Details, unfortunately, no. UPD: Details appeared, this is not a navigation, but a telecommunications system , more precisely, its antenna. In the trunk under the shelf is its control unit (there is a general view of the trunk below).

This is one of the rear stereo cameras and the “antenna box”, which is not described on the VisLab site, apparently this is another radio modem . The functionality of the rear stereo cameras is about the same as that of the front laser scanners - the detection of obstacles. The transparent box in the background is a switching unit with connectors that are protected from rain by a plastic case.

View of the car from the side. It can be seen how many organizations had a hand in the project. You can also see two sockets . One standard, through it there is a charge of the batteries feeding the engine:

And the one supplied by VisLab, this outlet is used to power the “automatic driver” when setting up and debugging the system:

Next to the socket, you can see the RJ-45 connector - this is a regular Gigabit Ethernet port that can be used for high-speed connection of the onboard computer network to the “outside world”.
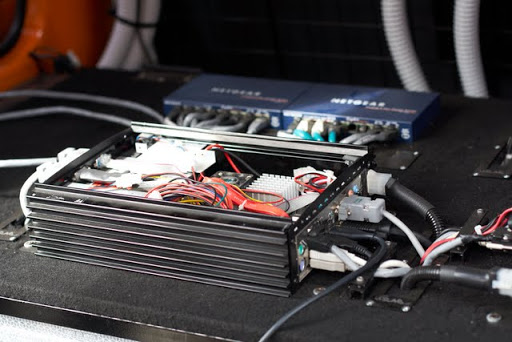
Well and, probably, the most interesting for habra people are the “brains” of the system:

An onboard network diagram, from which it can be seen that the system has three “brains” - these are three CarPCs , each of which is engaged in its task. There is little data on the configuration of computers, from what is seen in the photo - 64-GB SSD Kingston is used. SSD is the best option for CarPC, not only because of speed, but also because of its insensitivity to vibrations. From what is not visible in the photo, but I managed to see that there are Socket 478 processor connectors on the motherboards. The radiators are rather modest there, so I find it difficult to say which processors are used in these computers. Obviously, not Intel Atom, possibly C7 from VIA Technologies.
The first PC, "brown1" , is engaged in laying a course and directly driving a car. The X-BY-WIRE system is connected to it, it is also Drive-by-Wire , i.e. proper control system of the car with the help of servomotors, by wire. Also, navigation receivers, inertial sensor systems and other equipment Topcon and Thales are connected to a fair amount of COM ports.

The second PC, “brown2” , is responsible for “gluing together” the panoramic image from the three cameras on the windshield and its processing, as well as for detecting obstacles with the help of front laser scanners on the bumper. Video cameras are connected to this computer via IEEE1394, scanners are also connected to the common on-board Ethernet network.
The third PC, “brown3” , is working on tracking the road condition using a fourth scanner (the one on the roof) and four cameras — two front cameras that give a stereo image of what is in front of the car and two rear cameras that give a similar image of what is happening behind . Also, the rear stereo image detects obstacles in the back. 4 cameras are directly connected to this computer from the roof, again via Firewire.

Solar battery backup charge controller . The battery itself, apparently, is located in a box on which all computers are installed.

Next to the controller, for some purpose, a unmarked communicator attached to brown1 was attached. Judging by the keys - with the Android OS inside. As suggested in the comments - this is the Nexus One. The assignment remained a mystery to me - the Italians had never turned it on for the entire time of the demonstration. Thanks to the habraouzer SovGVD , the purpose of the communicator was also clarified - this is an IBM system for collecting information on carbon dioxide concentration , it is written about it a little later.

Scanners and computers are interconnected by a gigabit network, so these are ordinary gigabit switches, maybe even someone reading at work or at home is the same.
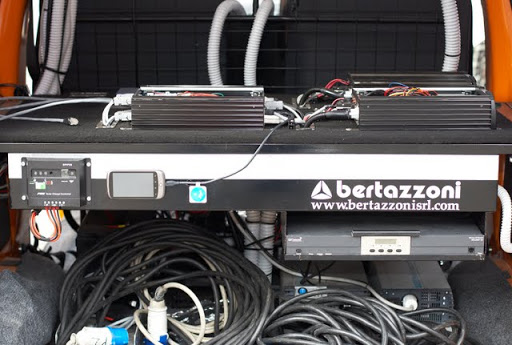
General view with an open trunk, warm the heart of any sysadmin. Under the shelf on the right you can see the control unit of the telecommunication system Thales.
Of course, it is interesting to look at cars in motion. Unfortunately, I did not have a high-quality video camera, only my communicator. Therefore, first a description, then a photo, and then a modest short video.
So, the details of the race: there are 4 machines in total , two of them are main and two are backup ones . At the demonstration, there were only three, one Italians had gone somewhere. Directly demonstrated again, two "microcarts". In addition, a whole chain of trailers should follow the mileage, in case of setting up systems, repairs, unforeseen situations, etc. But the trailers didn’t come to the demonstration, so there’s nothing to say to me about it.
All electric vehicles are equipped with the same equipment (with the exception of the telecommunications system - the one in the brown case, it is present in a single copy on the host machine).
As I said, the roles of the two cars are different: the first, the “lead” , automatically moves most of the way, but in some cases a person has to intervene in the management, because sometimes there are deviations from the intended course and various unforeseen situations occur. Also, the first machine collects data throughout the journey, and it also carries out various experiments with scanners and cameras, decision-making systems and control systems. As added braindamaged , the machine measures the level of CO 2 along the whole route and posts it to Twitter.
The second, the “slave” machine is controlled by a computer 100% of the time, a person never interferes with management. The system is constantly being finalized, bugs are fixed and, according to VisLab, such a machine after a run will be able to move along a vaguely defined route completely automatically. The electromobiles created on such prototype can be used for transportations in the conditions of the city center with its brisk movement.
Cars are traveling from Milan to Shanghai, a significant part of the run passes through the territory of Russia. The site has a schedule of main stops for dates, on August 22nd, the cars should be in Nino, and after that there will be many more stops in Russian cities, from Saratov right up to Kemerovo.
And now some photos in motion:

Both cars , leading and driven. The presenter at this moment is controlled manually, followed automatically as usual.

The leading machine is bigger.

Driven in automatic mode.


“Look how I can do it!”
Video on Youtube, both cars automatically:
In conclusion, I would like to express my gratitude to VisLab, who created this piece of the future (although they have been doing this since the 90s of the last century) and to my friend who wished to remain anonymous, who called me and took me to the event.
If someone has questions - write in the comments, I will try to answer. In addition, the run site and the VisLab site (links at the beginning of the article) contain a lot of information in English. From the most interesting on the site - the ability to observe the picture from the cameras of the leading car in real time. True broadcast, unfortunately, falls off regularly due to technical problems, but sometimes it still works.
UPD: It turned out, there was already material on this topic, but it was very short and without details. There was also one report on cars in motion , there is an interesting video.
First of all, I want to disappoint those who watched the movie “I, the Robot” and were flattered by the picture above. No super-fast supercars without a steering wheel, everything is much more modest. The usual Italian "microcar" electric powered Piaggio Porter , pasted labels and tied with wires. Looking ahead - fully automatic control in VisLab is also not yet achieved. But still the cars are very interesting and VisLab had something to show.Handsome, right?
Front view, "trailer" hung with sensors and equipment. Below is a description of everything that is installed additionally outside and inside.
On the roof in front, above the windshield, are placed front cameras that form a stereoscopic image (right and left), a stereo image of about 80 cm. The road surface roughness, road marking and possible slope are tracked by the stereoscopic image when driving on good roads. In the center, between the cameras, with an inclination downward, there is an off-road laser scanner ; it relies on automatic equipment when driving on
Three more laser scanners are installed on the front bumper. Of them:
- 2 side working in the same plane - parallel to the ground, with a field of view of ~ 240 degrees (due to installation in the bumper, a truly constructive field of view - 270 degrees).
- Central operating in 4 planes , with a field of view of about 100 degrees.
Almost the entire roof is occupied by the solar battery , from which the entire automatic control system is powered. It has nothing to do with standard batteries and electric motor. It was done this way, because VisLab wanted to make minimal changes to the standard electric vehicle systems. For bad weather and night driving, the control system has its own backup batteries. Another interesting thing on the roof:
Terribly useful device with the emblem Topcon Positioning Systems, includes:
- Three-system (GPS, GLONASS, Galileo , GLONASS frequencies: L1, L2, GPS: L1, L2, L5) navigation receiver for outdoor navigation.
- A set of inertial sensors for navigation in the absence of data from the receiver.
- Radio modem
- Perhaps something else, the device is being expanded with plug-ins.
The device in the brown case without inscriptions was installed only on one of the machines, according to some data it is a Thales navigation system , similar in functionality to the above-described Topcon.
This is one of the rear stereo cameras and the “antenna box”, which is not described on the VisLab site, apparently this is another radio modem . The functionality of the rear stereo cameras is about the same as that of the front laser scanners - the detection of obstacles. The transparent box in the background is a switching unit with connectors that are protected from rain by a plastic case.
View of the car from the side. It can be seen how many organizations had a hand in the project. You can also see two sockets . One standard, through it there is a charge of the batteries feeding the engine:
And the one supplied by VisLab, this outlet is used to power the “automatic driver” when setting up and debugging the system:
Next to the socket, you can see the RJ-45 connector - this is a regular Gigabit Ethernet port that can be used for high-speed connection of the onboard computer network to the “outside world”.
Well and, probably, the most interesting for habra people are the “brains” of the system:
An onboard network diagram, from which it can be seen that the system has three “brains” - these are three CarPCs , each of which is engaged in its task. There is little data on the configuration of computers, from what is seen in the photo - 64-GB SSD Kingston is used. SSD is the best option for CarPC, not only because of speed, but also because of its insensitivity to vibrations. From what is not visible in the photo, but I managed to see that there are Socket 478 processor connectors on the motherboards. The radiators are rather modest there, so I find it difficult to say which processors are used in these computers. Obviously, not Intel Atom, possibly C7 from VIA Technologies.
The first PC, "brown1" , is engaged in laying a course and directly driving a car. The X-BY-WIRE system is connected to it, it is also Drive-by-Wire , i.e. proper control system of the car with the help of servomotors, by wire. Also, navigation receivers, inertial sensor systems and other equipment Topcon and Thales are connected to a fair amount of COM ports.
The second PC, “brown2” , is responsible for “gluing together” the panoramic image from the three cameras on the windshield and its processing, as well as for detecting obstacles with the help of front laser scanners on the bumper. Video cameras are connected to this computer via IEEE1394, scanners are also connected to the common on-board Ethernet network.
The third PC, “brown3” , is working on tracking the road condition using a fourth scanner (the one on the roof) and four cameras — two front cameras that give a stereo image of what is in front of the car and two rear cameras that give a similar image of what is happening behind . Also, the rear stereo image detects obstacles in the back. 4 cameras are directly connected to this computer from the roof, again via Firewire.
Solar battery backup charge controller . The battery itself, apparently, is located in a box on which all computers are installed.
Next to the controller, for some purpose, a unmarked communicator attached to brown1 was attached. Judging by the keys - with the Android OS inside. As suggested in the comments - this is the Nexus One. The assignment remained a mystery to me - the Italians had never turned it on for the entire time of the demonstration. Thanks to the habraouzer SovGVD , the purpose of the communicator was also clarified - this is an IBM system for collecting information on carbon dioxide concentration , it is written about it a little later.
Scanners and computers are interconnected by a gigabit network, so these are ordinary gigabit switches, maybe even someone reading at work or at home is the same.
General view with an open trunk, warm the heart of any sysadmin. Under the shelf on the right you can see the control unit of the telecommunication system Thales.
Of course, it is interesting to look at cars in motion. Unfortunately, I did not have a high-quality video camera, only my communicator. Therefore, first a description, then a photo, and then a modest short video.
So, the details of the race: there are 4 machines in total , two of them are main and two are backup ones . At the demonstration, there were only three, one Italians had gone somewhere. Directly demonstrated again, two "microcarts". In addition, a whole chain of trailers should follow the mileage, in case of setting up systems, repairs, unforeseen situations, etc. But the trailers didn’t come to the demonstration, so there’s nothing to say to me about it.
All electric vehicles are equipped with the same equipment (with the exception of the telecommunications system - the one in the brown case, it is present in a single copy on the host machine).
As I said, the roles of the two cars are different: the first, the “lead” , automatically moves most of the way, but in some cases a person has to intervene in the management, because sometimes there are deviations from the intended course and various unforeseen situations occur. Also, the first machine collects data throughout the journey, and it also carries out various experiments with scanners and cameras, decision-making systems and control systems. As added braindamaged , the machine measures the level of CO 2 along the whole route and posts it to Twitter.
The second, the “slave” machine is controlled by a computer 100% of the time, a person never interferes with management. The system is constantly being finalized, bugs are fixed and, according to VisLab, such a machine after a run will be able to move along a vaguely defined route completely automatically. The electromobiles created on such prototype can be used for transportations in the conditions of the city center with its brisk movement.
Cars are traveling from Milan to Shanghai, a significant part of the run passes through the territory of Russia. The site has a schedule of main stops for dates, on August 22nd, the cars should be in Nino, and after that there will be many more stops in Russian cities, from Saratov right up to Kemerovo.
And now some photos in motion:
Both cars , leading and driven. The presenter at this moment is controlled manually, followed automatically as usual.
The leading machine is bigger.
Driven in automatic mode.
“Look how I can do it!”
Video on Youtube, both cars automatically:
In conclusion, I would like to express my gratitude to VisLab, who created this piece of the future (although they have been doing this since the 90s of the last century) and to my friend who wished to remain anonymous, who called me and took me to the event.
If someone has questions - write in the comments, I will try to answer. In addition, the run site and the VisLab site (links at the beginning of the article) contain a lot of information in English. From the most interesting on the site - the ability to observe the picture from the cameras of the leading car in real time. True broadcast, unfortunately, falls off regularly due to technical problems, but sometimes it still works.
UPD: It turned out, there was already material on this topic, but it was very short and without details. There was also one report on cars in motion , there is an interesting video.
')
Source: https://habr.com/ru/post/102180/
All Articles